自动再校准
5
工业 自动 化 专家 CAD2D3D.com
.相机 校准 B-83304CM/04
相对 于 基准 坐标 系 的 校准 夹具 的 位 置
1
这 是 从 检测 出 校准 面 1 时 的 基准 坐标 系 看 到 的 点 阵 坐 标 系 的 位 置 。 也 即 , 该 位 置 表 示 在 校准 相机 时 , 点 阵 板 被 设置 在 何
处 。
手持 相机 机 器 人 的 位 置
这 是 具有 检测 出 校准 面 1 时 的 相机 的 机 器 人 的 位 置 。 它 表 示 从 基准 坐标 系 看 到 的 机 器 人 的 机 械 接口 坐标 系 (手腕 法 兰 盘 )
的 位 置 。 只 有 在 固定 于 机 器 人 的 相机 时 才 显 示 值 。
相机 坐标 系 在 机 器 人 坐标 系 内 的 位 置
激光 坐标 系 在 机 器 人 坐标 系 内 的 位 置
腕 法 兰 盘 ) 看 到 的 表示 相机 的 拍摄 方
口 板 400 mm (或 者 600 mm, 依 据
这 是 已 将 立体 传感器 安装 在 机 器 人 的 机 械 手 上 时 , 从 机 器 人 的 机 械 接口 坐标 系 〈
向 的 坐标 和 置 。 此 坐标 系 被 定义 为 位 于 “相机 光 轴 上 的 、 距 受 光 单元
立体 传感器 的 E 距 ) 的 位 置 ”, 乙 轴 与 “相机 的 光 轴 平行 ”。 若 对 机 器 人 的 工
点 动 , 则 可 不 改变 相机 距离 地 使 得 机 器 人 点 动 , 或 使 相机 绕 着 光 轴 旋转 。
坐标 系 设 定 此 值 , 并 基于 工具 坐标 系
安装 在 机 器 人 的 机 械 手 上 时 , 从 机 器 人 的 机 械 接口 坐标
方向 的 坐标 和 。 此 坐标 系 被 定义 为 : 原点 在 “2 根 激光 投 影 线 的 交
600 mm, 依 据 立体 传感器 的 基准 距 ) 的 位 置 ”, 2
SEA, FFIET T RLASR RHEAT B, WA 2 RO R L
这 是 在 已 将 立体 传
5.3.4 自动 再 校准
系统 运行 开始 后 因为 某 种 理由 而 立体 传感器 偏 移 或 者 进行 更 换 时 , 需 要 进行 立体 传感器 的 再 校准 。 这 种 情况 下 , 使 用 自
动 再 校准 即 可 简单 地 进行 恢复 。 此 外 , 由 于 无 需 手动 操作 即 可 恢复 , 可 以 避免 作业 人 员 的 人 为 失误 。 进 行 自动 再 校准 时 ,
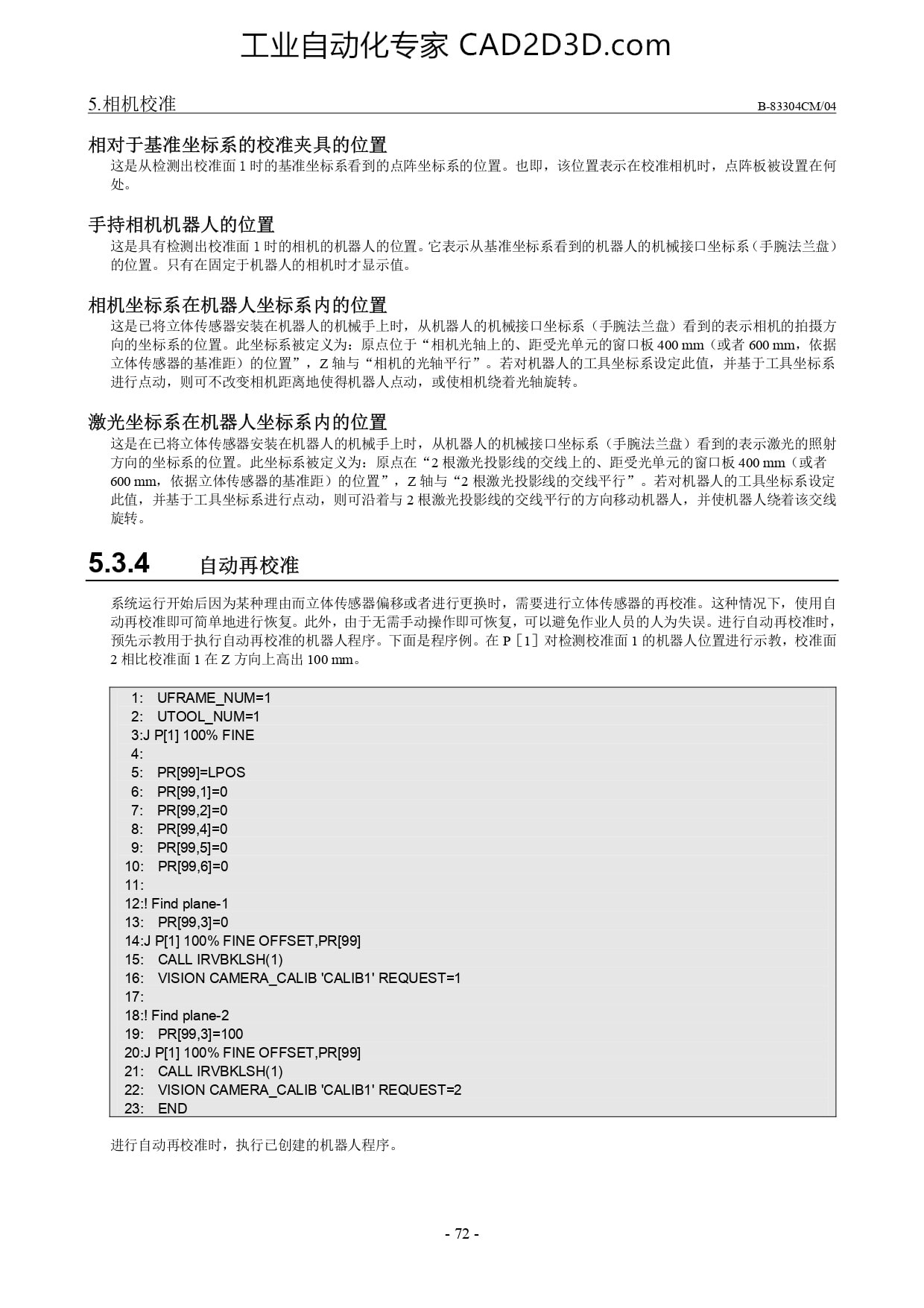
预先 示 教 用 于 执行 自动 再 校准 的 机 器 人 程序 。 下 面 是 程序 例 。 在 P [1] 对 检测 校准 面 1 的 机 器 人 位 置 进行 示 教 ,
2 相 比 校准 面 1 在 乙方 向 上 高 出 100 mm。
1: UFRAME_NUM=1
2: UTOOL_NUM=1
3:J P[1] 100% FINE
2
5. PR[99]=LPOS
6: PR[99,1]=0
7: PR[99,2]=0
8: PR[99,4]=0
9: PR[99,5]=0
10: PR[99,6]=0
12 ! Find plane-1
13: PR[99,3]=0
14:J P[1] 100% FINE OFFSET,PR[99]
15: CALL IRVBKLSH(1)
16: VISION CAMERA_CALIB 'CALIB1' REQUEST=1
17
18:! Find plane-2
19: PR[99,3]=100
20:J P[1] 100% FINE OFFSET,PR[99]
21: CALL IRVBKLSH(1)
22: VISION CAMERA_CALIB 'CALIB1' REQUEST=2
23: END
进行 自动 再 校准 时 , 执 行 已 创建 的 机 器 人 程序
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)