相机的校准
工业 自动 化 专家 CAD2D3D.com
和. 相机 校准 B.83304CMI04
校准 的 执行
以 向 导 形式 按照 如 下 步骤 进行 相机 的 校准 。
企 注意
请 在 进行 相机 校准 之 前 , 确 认 追 踪 坐标 系 的 设 定 已 经 完成 。 相 机 校准 后 重新 进行 追踪 坐标 系 的 设 定时 , 也 需要
重新 进行 相机 的 校准 。
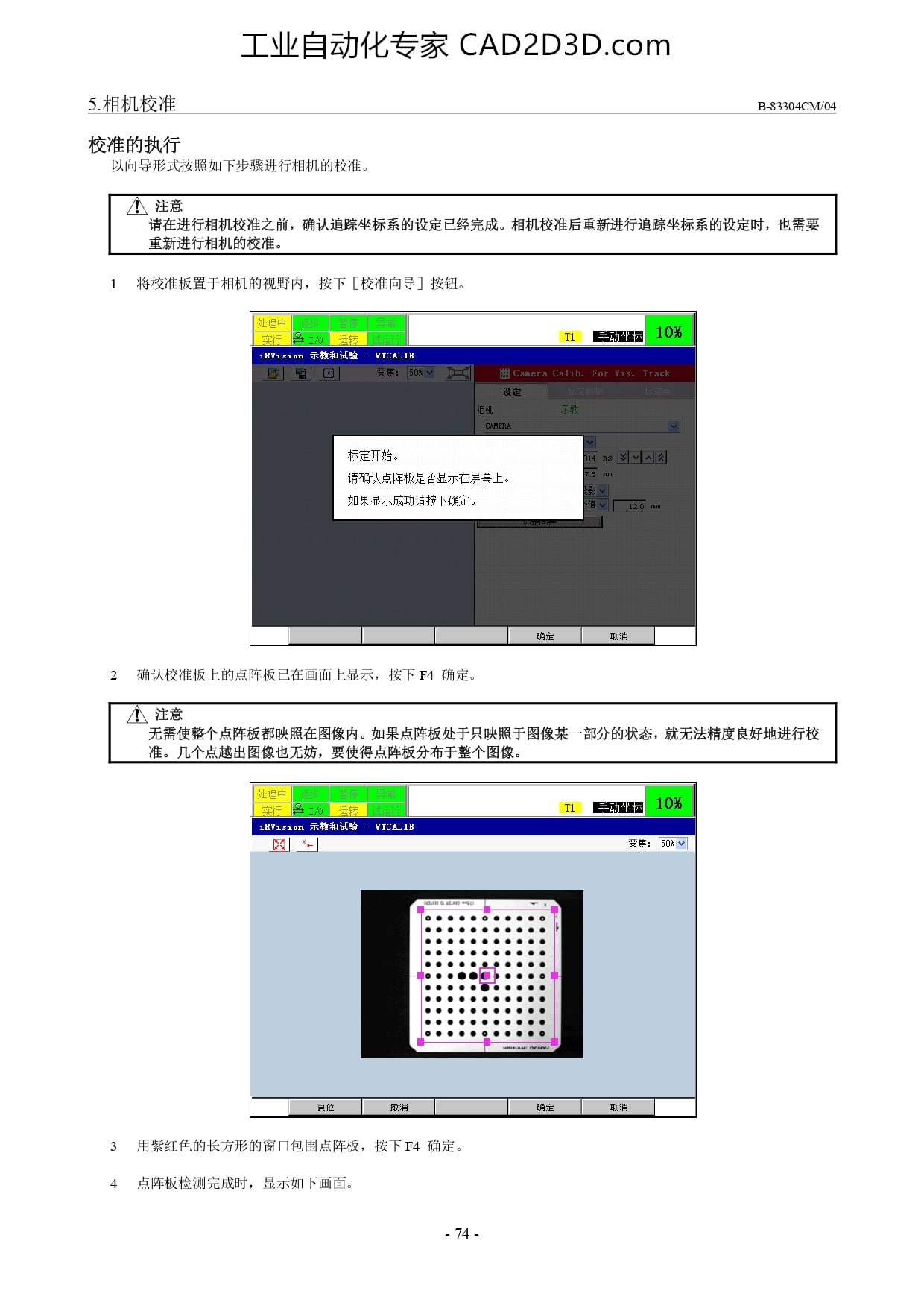
1 将 校准 板 置 于 相机 的 视野 内 , 按 下 [校准 向 导 ] 按钮 。
示 教 和 试验 - YICALIB
标定 开始 。
请 确认 点 阵 板 是 否 显示 在 屏幕 上 。
如 果 显示 成 功 请 按 下 确定 。
2 确认 校准 板 上 的 点 阵 板 已 在 画面 上 显示 , 按 下 F4 确定 。
注意
无 需 使 整个 点 阵 板 都 映照 在 图 像 内 。 如 果 点 阵 板 处 于 只 映照 于 图 像 某 一 部 分 的 状态 , 就 无 法 精度 良好 地 进行 校
准 。 几 个 点 越 出 图 像 也 无 妨 , 要 使 得 点 阵 板 分 布 于 整个 图 像 。
B T
3 ”用 紫红 色 的 长 方形 的 窗口 包围 点 阵 板 , 按 下 F4 确定 。
4 点 阵 板 检测 完成 时 , 显 示 如 下 画面 。
-74-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)