相机的校准
工业 自动 化 专家 CAD2D3D.com
B-§3304CM/04 5. 相 机 校准
7
夹具 的 原点 位 置 设 定 。
LA 人 的 动作 范
昌 和 到 信 兴 当 夺 迁 入 到 机 器 人 的 动作 范
).
2. i mEn a8 A SETCPRERIZIR 57,
按 卜 确定。
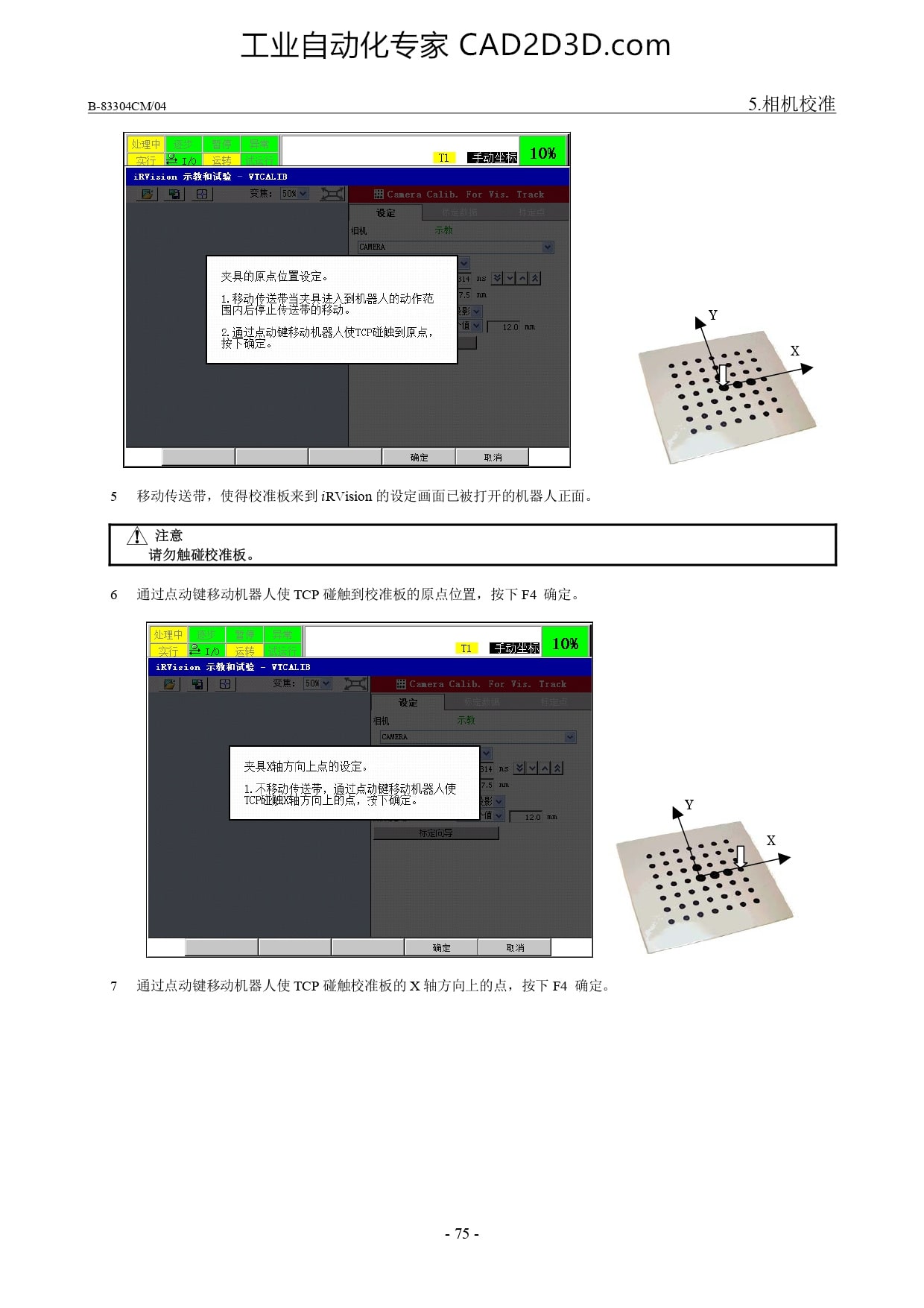
S 移动 传送 带 , 使 得 校准 板 来 到 座 Vision 的 设 定 画面 已 被 打开 的 机 器 人 正面 。
6 ”通过 点 动 键 移动 机 器 人 使 TCP 碰 触 到 校准 板 的 原点 位 置 , 按 下 F4 确定 。
U e R
夹具 天 由 方向 上 点 的 设 定 。
BT B
7 ”通过 点 动 键 移动 机 器 人 使 TCP 碰 触 校准 板 的 和 轴 方 向 上 的 点 , 按 下 F4 确定 。
-75-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)