INVERSE
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 12. 其 他 选项 功能
1: VISION RUN_FIND VISION1
2: VISION GET_OFFSET VISION1 VR[1] JUMP,LBL[99]
3: PRMI=VR[1].FOUND_POS[1]
4: PRI2=VRI1LOFFSET
5: CALLINVERSE(2,2)
6: CALL MATRIX(2,1,1)
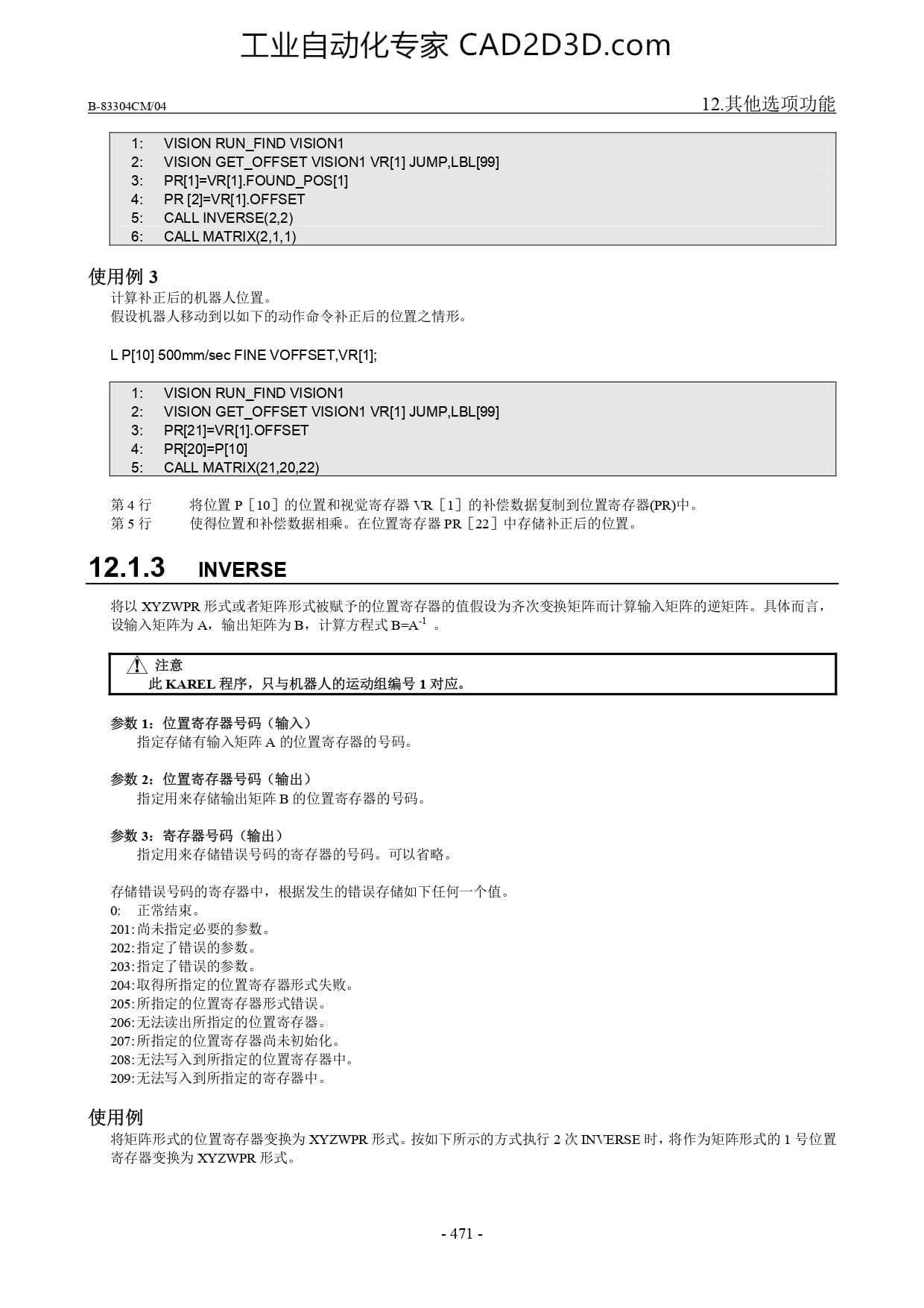
使 用 例 3
计算 补正 后 的 机 器 人 位 置 。
假设 机 器 人 移动 到 以 如 下 的 动作 命令 补正 后 的 位 置 之 情 形 。
L P[10] 500mm/sec FINE VOFFSET,VR[1];
VISION RUN_FIND VISION1
VISION GET_OFFSET VISION1 VR[1] JUMP,LBL[99]
PR[21]=VR[1].OFFSET
PRI20]=P[10]
CALL MATRIX(21,20,22)
RSO
第 4 行 将 位 置 P [10] 的 位 置 和 视觉 寄存 器 \R [1] 的 补偿 数据 复制 到
置 寄 存 器 (PR) 中 。
第 5 行 使 得 位 置 和 补偿 数据 相 乘 。 在 位 置 寄 存 器 PR [22] 中 存储 补正
12.1.3 INVERSE
将 以 XYZWPR 形式 或 者 矩阵 形式 被 赋予 的 位 置 寄存 器 的 值 假设 为 齐 次 变换 矩阵 而 计算 输入 矩阵 的 逆 和 矩阵 。 有 具体 而 言 ,
设 输 入 矩阵 为 A, 和 输出 矩阵 为 了 B, 计 算 方程 式 B=A- 。
此 KAREL 程序 , 只 与 机 器 人 的 运动 组 编号 1 对 应 。
参数 1: 位 置 寄 存 器 号 码 〈 输 入 )
指定 存储 有 输入 矩阵 A 的 位 置 寄存 器 的 号 码 。
参数 2;: 位 置 寄 存 器 号 码 〈 输 出
指定 用 来 存储 输出 矩阵 B 的 位 置 寄 存 器 的 号 码 。
参数 3 寄存 器 号 码 〈 输 出 )
指定 用 来 存储 错误 号 码 的 寄存 器 的 号 码 。 可 以 省 略 。
存储 错误 号 码 的 寄
0: 正常 结束 。
, 根 据 发 生 的 错误 存储 如 下 任何 一 个 值 。
使 用 例
将 矩阵 形式 的 位 置 寄 存 器 变换 为 XYZWPR 形式 。 按 如 下 所 示 的 方式 执行 2 次 INVERSE 时 , 将 作为 矩阵 形式 的 1 号 位 置
寄存 器 变换 为 XYZWPR 形式 。
-471-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)