MERGE3D2
B-83304CM/04
工业 自动 化 专家 CAD2D3D.com
12. 其 他 选项 功
《第 1 点 ) (第 2 点 )
附带 2 维 测量 平面 附带 2 维 测量 平面
A A
[ [
(B3 5
附带 或 者 不 附带 2 维
测量 平面
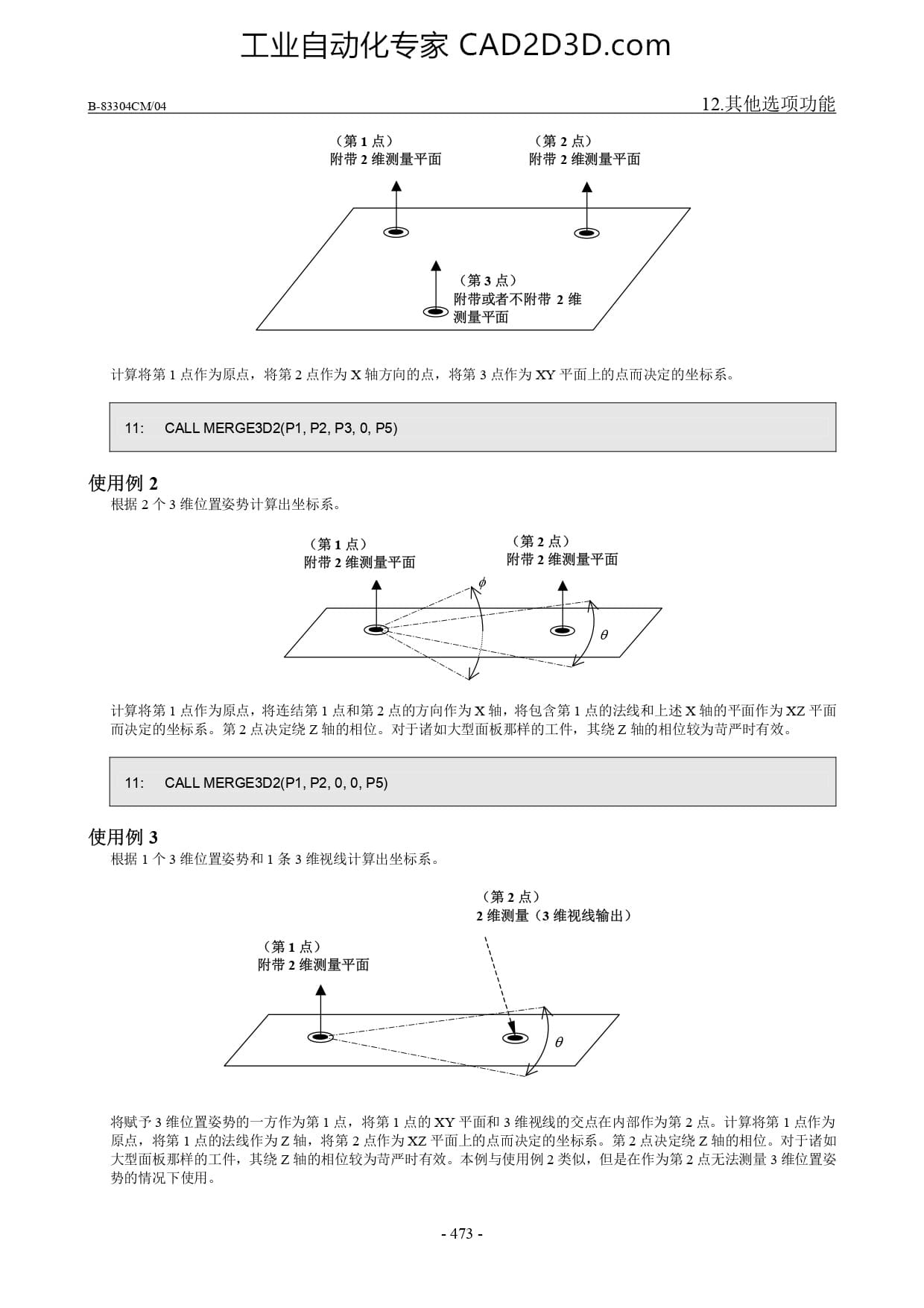
计算 将 第 1 点 作为 原点 , 将 第 2 点 作为 民 轴 方向 的 点 , 将 第 3 点 作为 XY 平面 上 的 点 而 决定 的 坐标 系
11: CALL MERGE3D2(P1, P2, P3, 0, P5)
使 用 例 2
根据 2 个 3 维 位 置 姿 势 计 算出 坐标 系
(第 1 点 ) 《第 2 点 )
附带 2 维 测量 平面 附带 2 维 测量 平面
计算 将 第 1
i A
11:
工 轴 的 相位 。 双
第 1 点 和 第 2 点 的 方向 作为 X 轴 , 将 包含 第 1 点 的 法 线 和 上 述 尺 轴 的 平面 作为 XZ 平
对 于 详 如 大 型 面板 那样 的 工件
CALL MERGE3D2(P1, P2, 0, 0, P5)
使 用 例 3
其 绕 Z 轴 的 相位 较为 苛 严 时 有 效
根据 1 个 3 维 位 置 姿 势 和 1 条 3 维 视线 计算 出 坐标 系
《第 1 点 )
附带 2 维 测量 平面
(第 2 点 )
2 维 测量 〈3 维 视线 输出
计算 将 第 1 点
% Z SR AL, %
如
2 点 无 法 测量 3 维 位 置 姿
-473 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)