相机视图的示教、相机校准数据、相机、曝光时间的设定、检出模式、检出面 Z 向高度、基准位置 X, Y
工业 自动 化 专家 CAD2D3D.com
MR B-83304CM/04
6.2.2 ”相机 视图 的 示 教
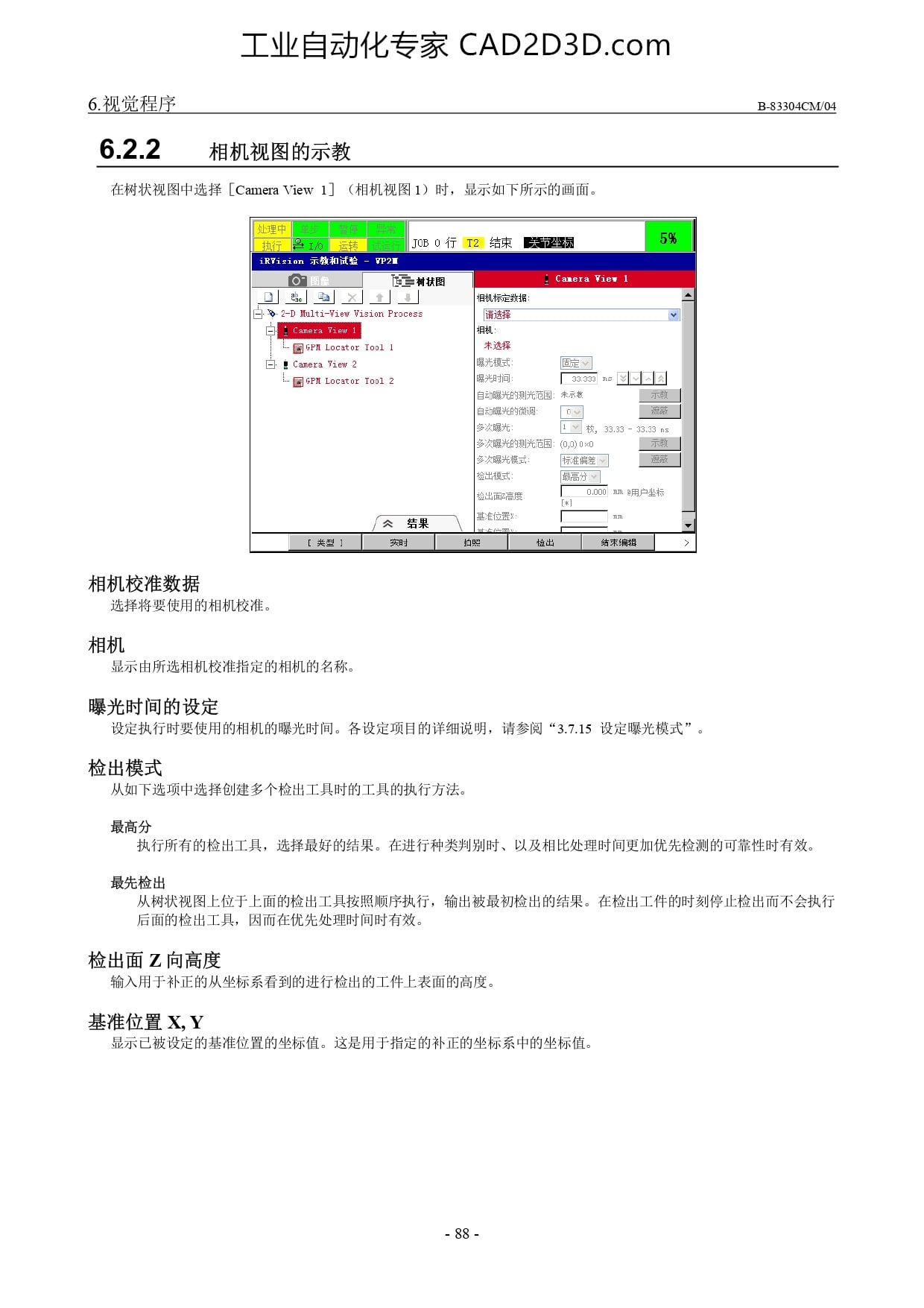
在 树 状 视图 中 选择 [Camera View 1] 〈 相 机 视图 1) 时 , 显 示 如 下 所 示 的 画面 。
PN Locator Toal 1
国 sp Locator Tool 2
相机 校准 数据
选择 将 要 使 用 的 相机 校准 。
相机
显示 由 所 选 相机 校准 指定 的 相机 的 名 称 。
曝光 时 间 的 设 定
设 定 执行 时 要 使 用 的 相机 的 曝光 时 间 。 各 设 定 项 目的 详细 说 明 , 请 参阅 “3.7.15 设 定 曝 光 模 式 ”。
检 出 模式
从 如 下 选项 中 选择 创建 多 个 检 出 工具 时 的 工具 的 执行 方法 。
最 高 分
执行 所 有 的 检 出 工具 , 选 择 最 好 的 结果 。 在 进行 种 类 判别 时 、 以 及 相 比 处 理 时 间 更 加 优先 检测 的 可 靠 性 时 有 效 。
最 先 检 出
从 树 状 视图 上 位 于 上 面 的 检 出 工具 按照 顺序 执行 , 输 出 被 最 初 检 出 的 结果 。 在 检 出 工件 的 时 刻 停止 检 出 而 不 会 执行
后 面 的 检 出 工具 , 因 而 在 优先 处 理 时间 时 有 效 。
检 出 面 乙 向 高 度
输入 用 于 补正 的 从 坐标 系 看 到 的 进行 检 出 的 工件 上 表面 的 高 度 。
基准 位 置 X, 立
显示 已 被 设 定 的 基准 位 置 的 坐标 值 。 这 是 用 于 指定 的 补正 的 坐标 系 中 的 坐标 值 。
-88 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)