程序的示教
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
6.7.1 程序 的 示 教
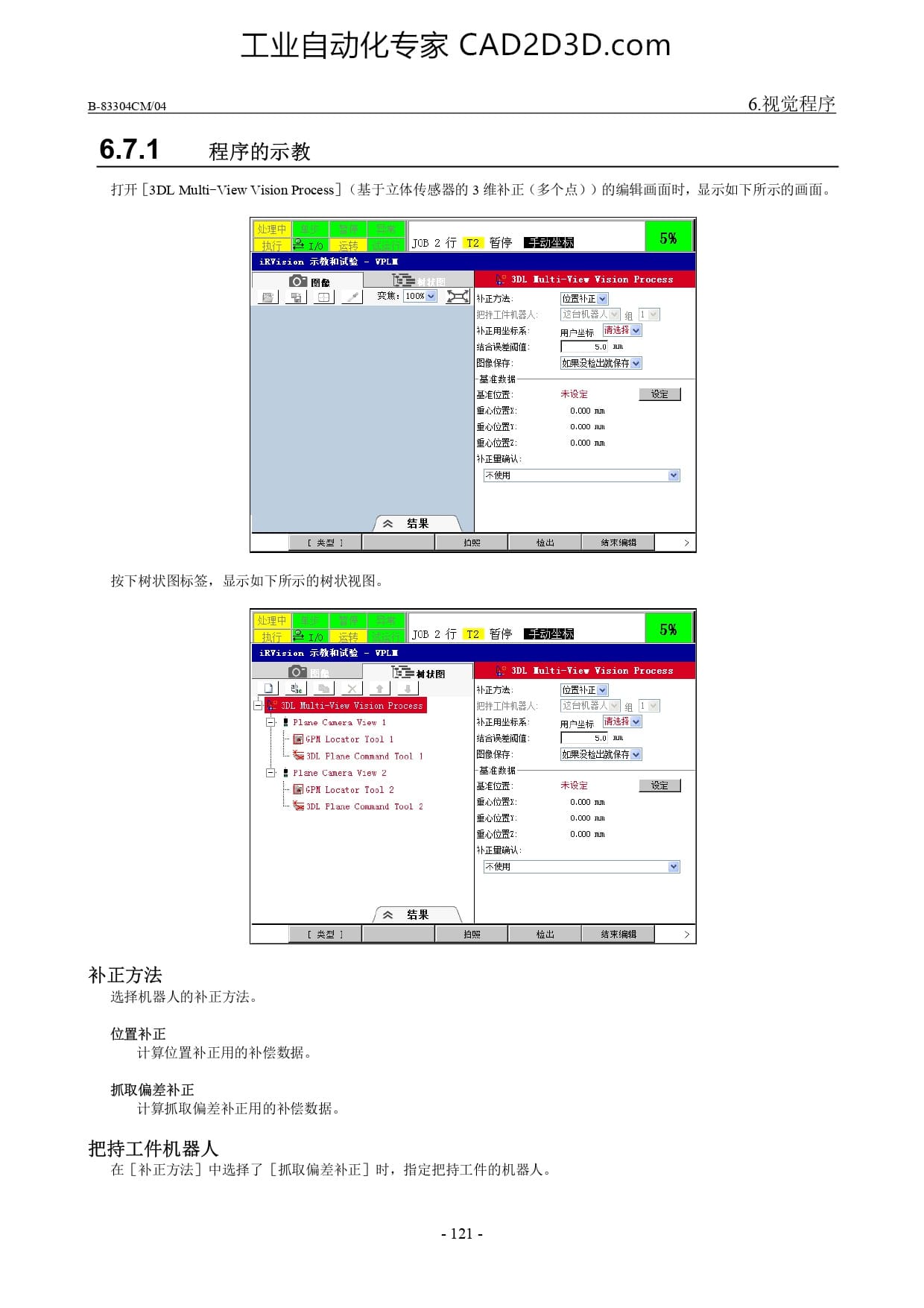
打开 [3DL Multi-View Vision Process] (基于 立体 传感器 的 3 维 补正 〈 多 个 点 ) ) 的 编辑 画面 时 , 显 示 如 下 所 示 的 画面 。
把持 工件 机 器 人
补正 用 全 标 系 -
[类 型 1 的 取 it SRR >
按 下 树 状 图 标签 , 显 示 :
B L Flane Connand Tool 1
器 & Pleane Camera View 2
国 spx Locator Tosl 2
%L Flane Comnand Tool 2
[类 型 1 的 中 检 册 药 束 纲 辑 >
位 置 补 正
计算 位 置 补正 用 的 补偿 数据 。
抓 取 偏差 补正
计算 抓 取 偏差 补正 用 的 补偿 数据 。
把 持 工件 机 器 人
在 [补正 方法 ] 中 选择 了 【[ 抓 取 偏差 补正 ] 时 , 指 定 把持 工 件 的 机 器 和 人。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)