基准数据、进行试验
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
曝光 时 间 的 设 定
设 定 执行 时 要 使 用 的 相机 的 曝光 时 间 。 各 设 定 项 目的 详细 说 明 , 请 参阅 “3.7.15 设 定 曙 光 模式 ”。
拍照 次 数
在 单一 的 曝光 时 间 内 进行 多 次 拍摄 , 希 望 取得 平均 图 像 时 使 用 。 此 设 定 只 有 在 【多 次 曝光 ] 为 1 枚 时 有 效 。
亮度 调整 模式
指定 多 次 眠 光 中 激光 图 像 合成 时 的 亮度 调整 方法 。
最 大 亮度
将 拍摄 的 全 部 激光 图 像 加 在 一 起 后 , 日 内 的 亮度 收敛 在 256 灰 度 的 方式 对 整个 图 像 的 亮度 进行 缩放 。 如
合计 亮度
将 拍摄 的 全 部 激光 图 像 加 在 一 走
不 变 , 只 有 引起 光 曙 的 像素 的 亮
拍照 时 IED
设 定 拍摄 激光 测量 用 的 图 像 时 的 LED 的 亮 灯 或 灭 灯 。
后 , 使 得 亮度 超过 256 灰 度 的 像素 的 亮度 限 幅 (达到 最 大 限度 ) 。 图 像 整体 的 亮度
被 抑制 在 255。
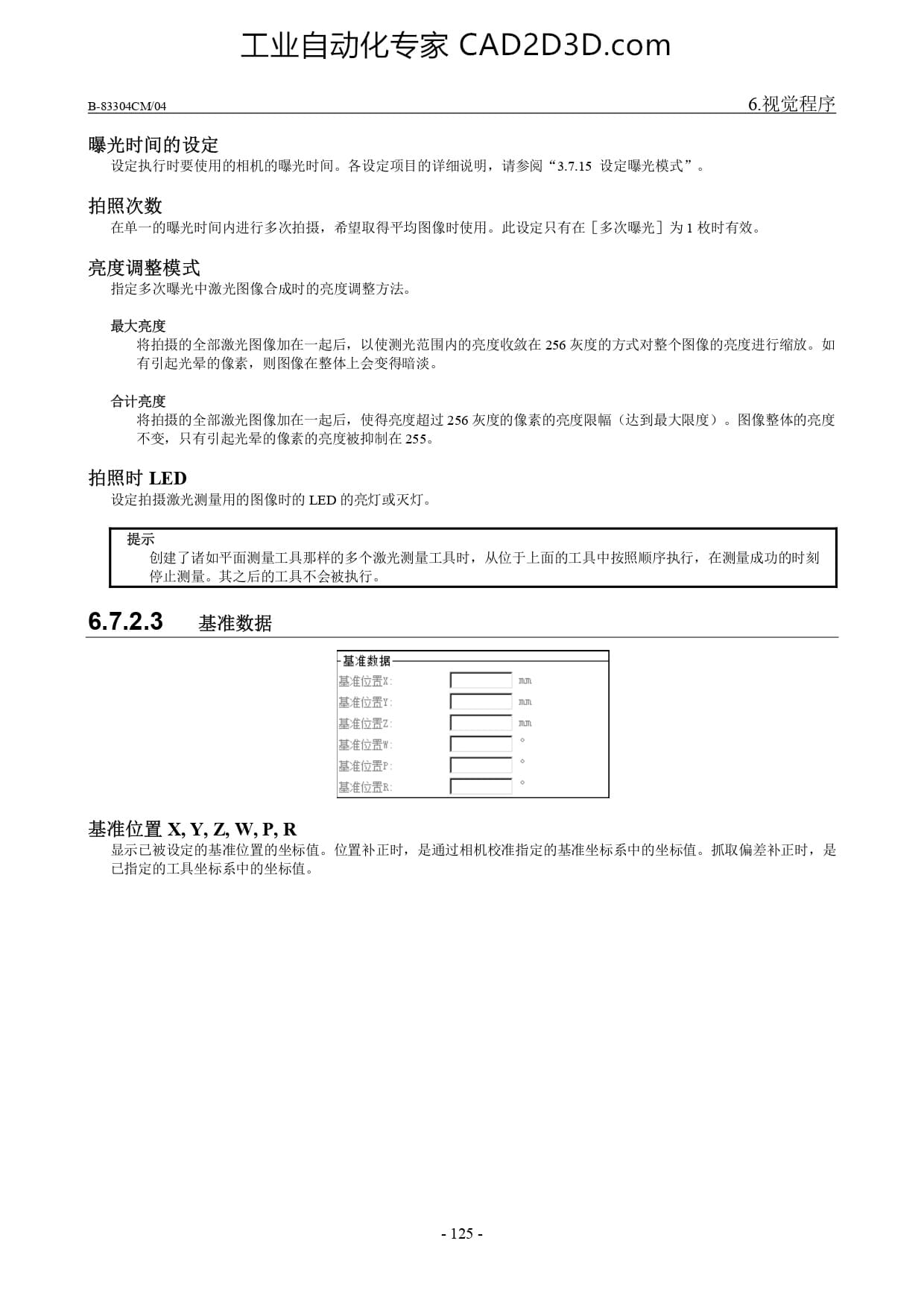
6.7.2.3 ”基准 数据
mm
mm
nn
1]
基准 位 置 X, Y, Z, W, P, 及
显示 已 被 设 定 的
位 置 的 坐标 值 。 位 置 补正 时 , 是 通过 相机 校准 指定 的 基准 坐标 系 中 的 坐标 值 。 抓 取 偏差 补正 时 , 是
已 指定 的 工具 科 的 坐标 值 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)