2 维测量的设定
工业 自动 化 专家 CAD2D3D.com
和 .视觉 程序 B-83304CM/04
6.8.1.1 激光 测量 的 设 定
进行 激光 测量 的 设 定 。
-激光 检 出 设 定
检 出 挟 小 的 区 域
激光 序号
2 向 检 出 范围
昌 光 8
50
== = 11
WETEWTfi
范围 按照 如 下 步骤 进行 设 定 。
1 图 像 。
2 K] o
3 六 使 希望 测量 的 部 位 来 到 图 像 中 心 的 方式 移动 机 器 人 。 此 时 , 若 按 下 团 按钮 , 预 先 显示
对 合 。
4 中 位 中 心 附近 的 方式 调整 立体 传感器 和 工件 的 距离 。 此 时 , 立 体 传感器 的 相机 和 测量 部
口 包围 要 示 教 的 工件 , 按 下 F4 确定 。 有 关 更 为 详细 的 操作 方法 ,
阅 “3.7.9 设
, 通 过 将 [测量 狭 窗 领 域 ] 设 为 有 效 , 即 可 增加 测量 中 使 用 的 点 列 数 。
按 下 [编辑 ] %
参阅 “3.7.14
测量
钮 。 即 使 进行 咕 蔽
遮蔽 ”
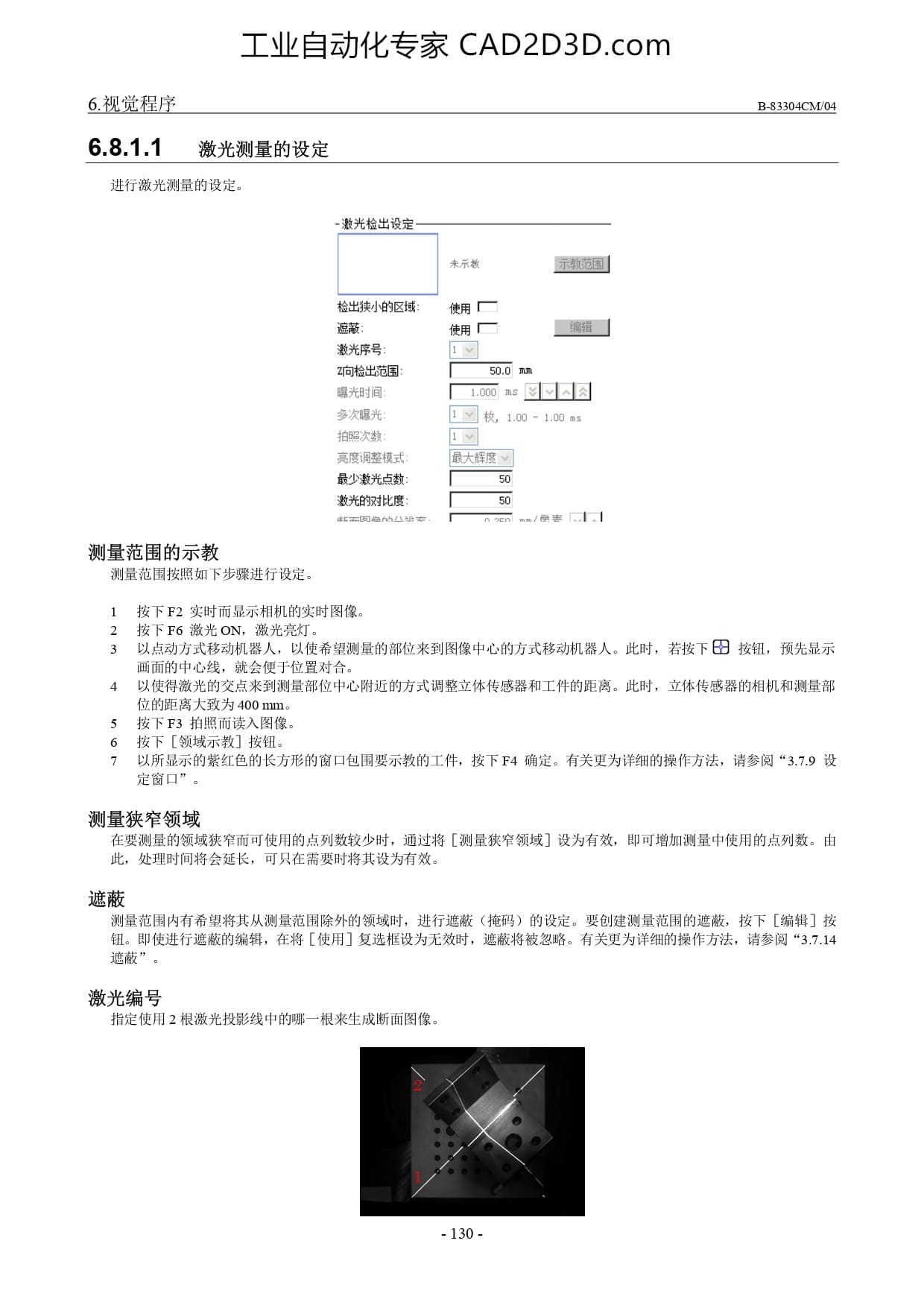
激光 编号
指定 使 用 2 根 激光 投影 线 中 的 哪 一 根来 生成 断面 图 像 。
-130 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)