图像运算工具
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 7. 命 令 行 工具
。 ”在 示 教 画面 上 进行 了 试验 的 情形
保存 结果 图 像
若 予以 勾 选 , 则 会 将 结果 图 像 保 存在 下 拉 框 中 所 指定 的 图 像 寄 存 器 中 。 没 有 图 像 寄存 器 时 , 显 示 错 误 。 有 关 图 像 寄存 器
的 详情 , 请 参阅 9.4.1 IRVSNAP、IRVFIND-。
图 像 显示 模 式
选择 编辑 画面 上 的 图 像 的 显示 模式 。
。 答 入 图 像
。 ”结果 图 像
使 用 结果 图 像 的 命令 行 工具
列表 显示 使 用 此 颜色 组 成 抽取 工具 创建 的 结果 图 像 作 为 输入 图 像 的 命令 行 工具 的 名 称 。 变 更 了 此 颜色 组 成 抽取 工具 时 ,
请 确认 列表 显示 的 命令 行 工具 正常 动作 。
使 用 此 过 滤器 的 命令 工具
国 cPN Locator Tool 1
7.44.2 ”进行 试验
按 下 F4 检 出 而 进行 试 蛤 , 确 认 是 否 按照 期 望 的 方式 动作 。
处 理 时 间
以 毫秒 为 单位 显示 颜色 组 成 抽取 工具 的 处 理 所 需 的 处 理 时 间 。
7.44.3 ”视觉 参数
命令 行 工具 中 , 没 有 使 用 视觉 参数 而 在 执行 时 从 机 器 人 的 程序 可 被 改写 的 参数 。
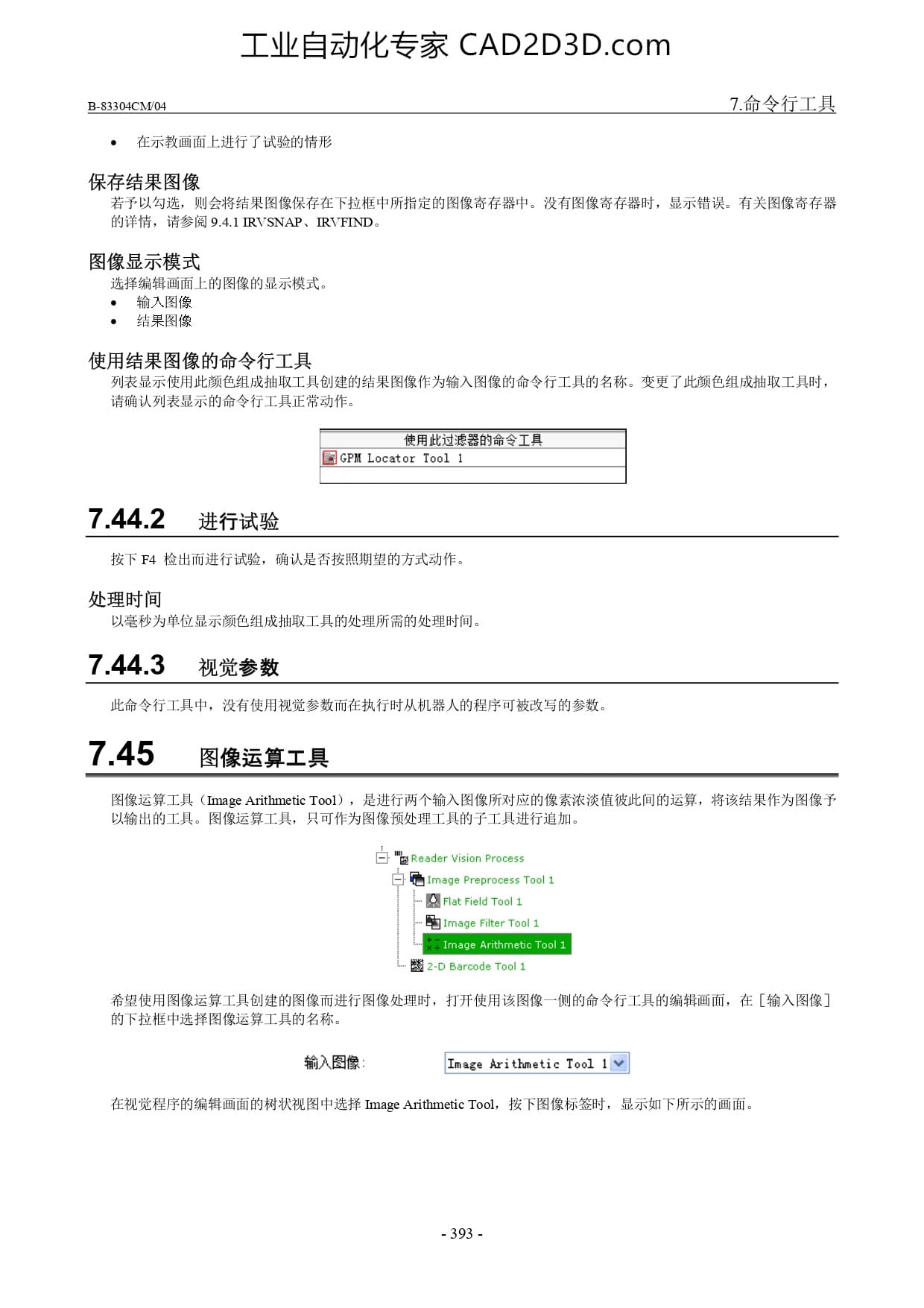
7.45 图像 运算 工具
图 像 运算 工具 (Image Arithmetic Tool) , 是 进行 两 个 输入 图 像 所 对 应 的 像素 浓淡 值 彼此 间 的 运算 , 将 该 结果 作为 图 像 子
以 输出 的 工具 。 图 像 运算 工具 , 只 可 作为 图 像 预 处 理工 具 的 子 工具 进行 追加 。
[} "Reader vision Process
[} Bl 1mage Preprocess Tool 1
Flat Field Tool 1
- B 1mage Filter Tool 1
2-D Barcode Tool 1
希望 使 用 图 像 运算 工具 创建 的 图 像 而 进行 图 像 处 理 时 , 打 开 使 用 该 图 像 一 侧 的 命令 行 工具 的 编辑 画面 , 在 【输入 图 像 ]
的 下 拉 框 中 选择 图 像 运算 工具 的 名 称 。
输入 图 像 : [Image Arithmetic Tool 1 v
在 视觉 程序 的 编辑 画面 的 树 状 视图 中 选择 Image Arithmetic Tool, 按 下 图 像 标签 时 , 显 示 如 下 所 示 的 画面 。
-393 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)