示教指南
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
6.4.5 。。 示 教 指南
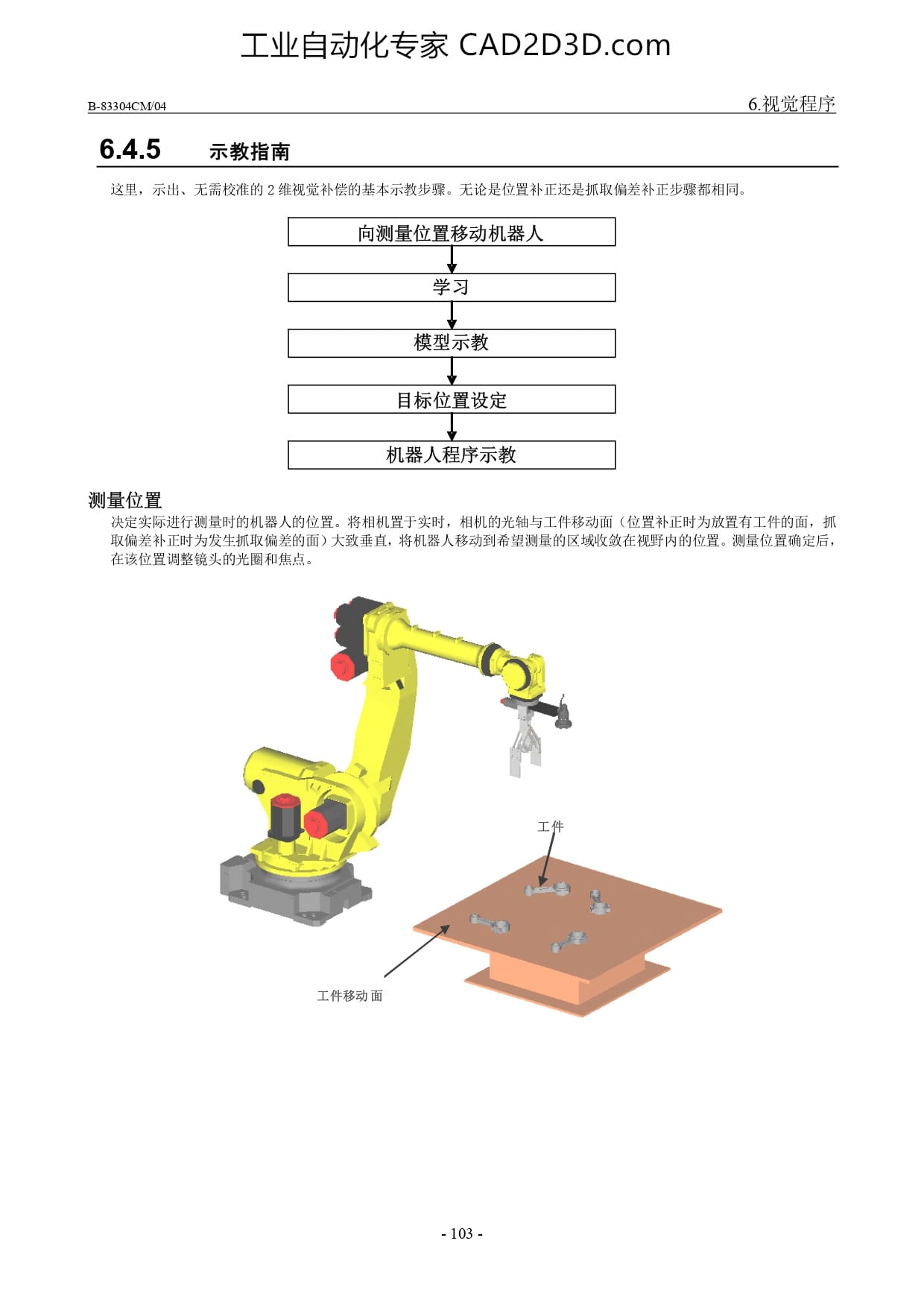
这 里 , 示 出 、 无 需 校准 的 2 维 视觉 补偿 的 基本 示 教 步 又。 无 论 是 位 置 补 正 还 是 抓 取 偏 差 补正 步 又 都 相同 。
向 测量 位 置 移 动机 器 人
学 习
模型 示 教
目标 位 置 设 定
机 器 人 程序 示 教
测量 位 置
决定 实际 进行 测量 时 的 机 器 人 的 位 置 。 将 相机 置 于 实时 , 相 机 的 光 轴 与 工件 移动 面 〈 位 置 补正 时 为 放置 有 工件 的 面 , 抓
取 偏 差 补正 时 为 发 生 抓 取 偏 差 的 面 ) 大 致 垂直 , 将 机 器 人 移动 到 希望 测量 的 区 域 收敛 在 视野 内 的 位 置 。 测量 位 置 确定 后 ,
在 该 位 置 调整 镜头 的 光圈 和 焦点 。
-103 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)