基于立体传感器的3 维补正(1 点)
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
% 3DL Plane Comnang Tool 1
@l
Ao [EERY]
A v
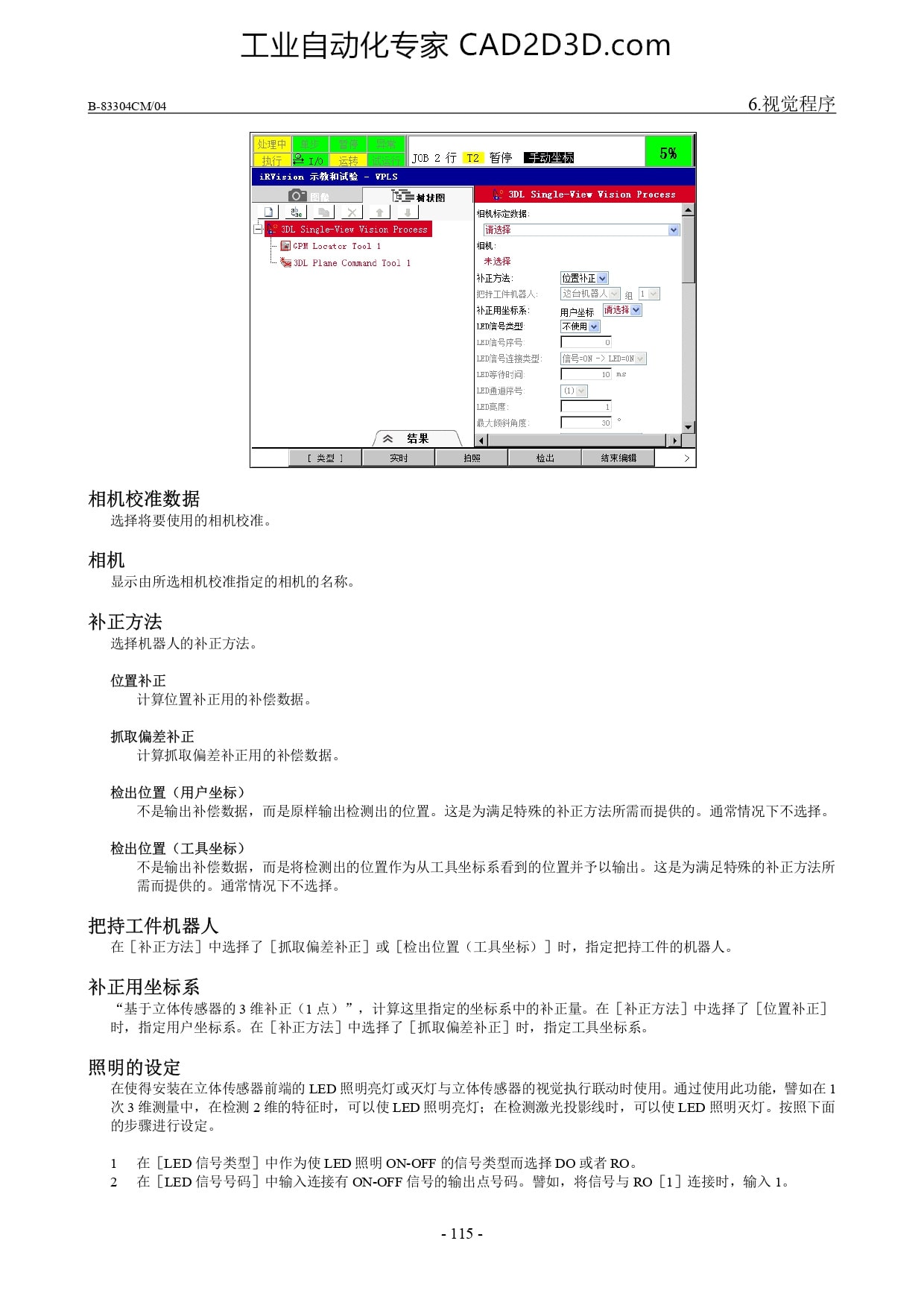
相机 校准 数据
选择 将 要 使 用 的 相机 校准 。
相机
显示 由 所 选 相机 校准 指定 的 相机 的 名 称 。
补正 方法
选择 机 器 人 的 补正 方法 。
位 置 补 正
计算 位 置 补正 用 的 补偿 数据 。
抓 取 偏差 补正
计算 抓 取 偏 差 补正 用 的 补偿 数据 。
检 出 位 置 《 用 户 坐 标 )
不 是 输出 补偿 数据 , 而 是 原样 输出 检测 出 的 位 置 。 这 是 为 满足 特殊 的 补正 方法 所 需 而 提供 的 。 通 常情 况 下 不 选择 。
检 出 位 置 《 工 具 坐标 )
不 是 输出 补偿 数据 , 而 是 将 检测 出 的 位 置 作 为 从 工具 坐标 系 看 到 的 位 置 并 予以 输出 。 这 是 为 满足 特殊 的 补正 方法 所
需 而 提供 的 。 通 常情 况 下 不 选择 。
把 持 工件 机 器 人
在 [补正 方法 ] 中 选择 了 【 抓 取 偏 差 补正 ] 或 [ 检 出 位 置 “工具 坐标 ) ] 时 , 指 定 把 持 工 件 的 机 器 人 。
补正 用 坐标 系
“基于 立体 传感器 的 3 维 补正 〈1 点 ) ”, 计 算 这 里 指定 的 坐标 系 中 的 补正 量 。 在 【补正 方法 ] 中 选择 了 [位置 补 正 ]
时 , 指 定 用 户 坐 标 系 。 在 【补正 方法 ] 中 选择 了 【[ 抓 取 偏 差 补正 ] 时 , 指 定 工具 坐标 系 。
照明 的 设 定
在 使 得 安装 在 立体 传感器 前 端的 LED 照明 亮 灯 或 灭 灯 与 立体 传感器 的 视觉 执行 联动 时 使 用 。 通 过 使 用 此 功能 , 璧 如 在 1
次 3 维 测量 中 , 在 检测 2 维 的 特征 时 , 可 以 使 LED 照明 亮 灯 ; 在 检测 激光 投影 线 时 , 可 以 使 LED 照明 灭 灯 。 按 照 下 面
的 步骤 进行 设 定 。
1 在 [LED 信号 类 型 ] 中 作为 使 LED 照明 ON-OFF 的 信号 类 型 而 选择 DO 或 者 RO。
2 在 [LED 信号 号 码 ] 中 输入 连接 有 ON-OFF 信号 的 输出 点 号 码 。 璧 如, 将 信号 与 RO [1] 连接 时 , 输 入 1。
-115 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)