进行试验
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04
6.6.2 ”进行 试验
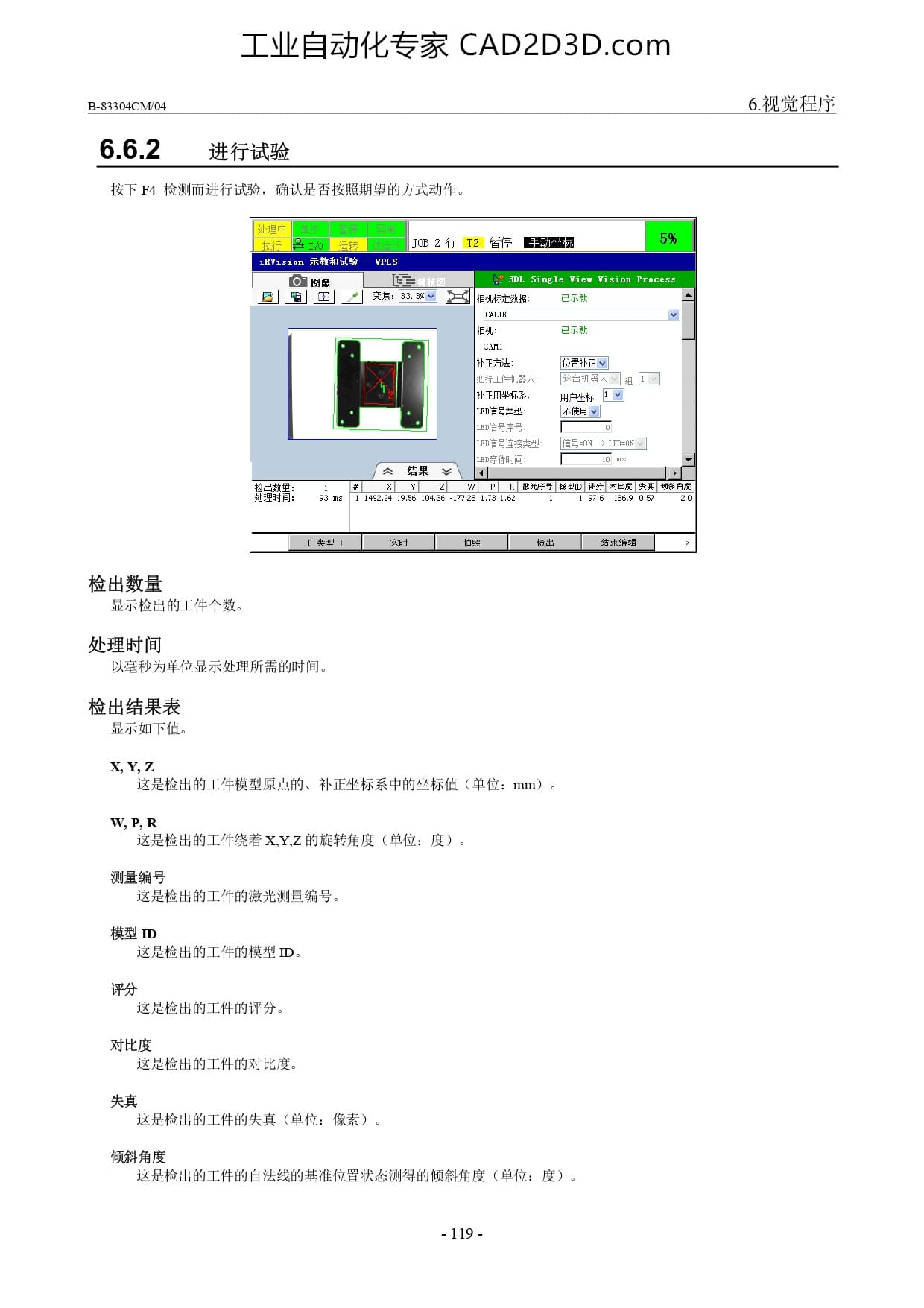
按 下 F4 检测 而 进行 试验 , 确 认 是 否 按照 期 望 的 方式 动作 。
|jos 2 47 T2 B EEEESR
/A #HR ¥\
X
检 出 数 里 : 1 Bl Y Z] W] P | MOUES | EMID] A N | KA | MBRE
SUEAIH: 93me | 1195224 195 10936 17728 173 L2 T 1we mes 0w 20
[类 到 ] 0 的 由 性 出 SRR >
检 出 数量
显示 检 出 的 工件 个 数 。
处 理 时 间
以 毫秒 为 单位 显示 处 理 所 需 的 时 间 。
检 出 结果 表
显示 如 下 值 。
XY,z
这 是 检 出 的 工件 模型 原点 的 、 补 正 坐 标 系 中 的 坐标 值 “单位 : mm) 。
W,P,R
这 是 检 出 的 工件 绕 着 X,Y,Z 的 旋转 角度 〔 单 位 : 度 ) 。
测量 编号
这 是 检 出 的 工件 的 激光 测量 编号 。
模型 ID
这 是 检 出 的 工件 的 模型 ID。
评分
这 是 检 出 的 工件 的 评分 。
对 比 度
这 是 检 出 的 工件 的 对 比 度 。
失真
这 是 检 出 的 工件 的 失真 〈 单 位 : 像素 ) 。
倾斜 角度
这 是 检 出 的 工件 的 自 法 线 的 基准 位 置 状 态 测 得 的 倾斜 角度 〈 单 位 : 度 ) 。
-119 -
6. 视 觉 程 序
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)