基于修正的设定
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 11. 点 阵 板
11.2.1 。 基于 修正 的 设 定
这 里 说 明 通 过 使 用 修正 销 进行 物理 修正 而 设
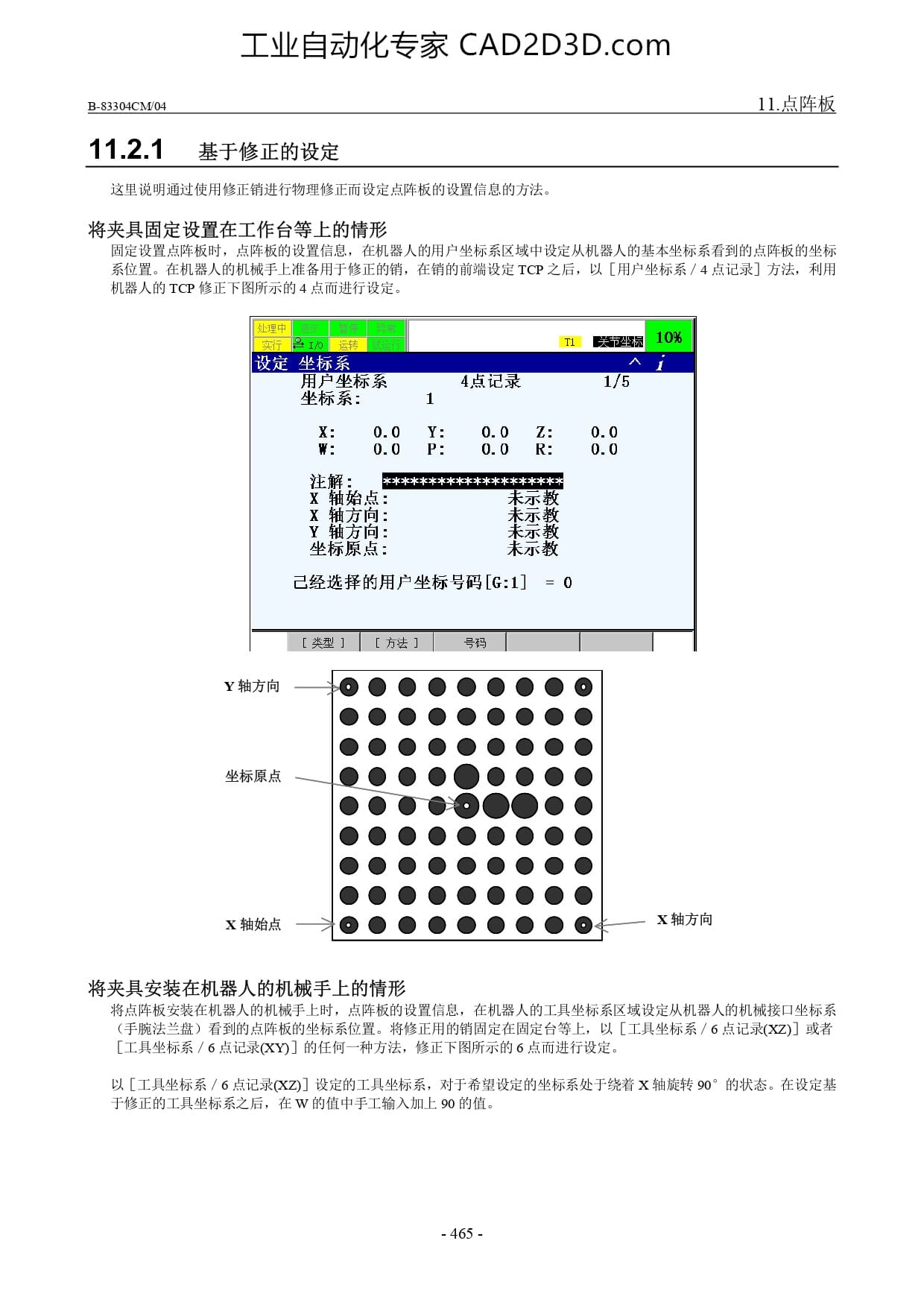
将 夹具 固定 设置 在 工作 台 等 上 的 情形
固定 设置 点 阵 板 时 ,
在 机 器 人 的 用 户
置 。 在 机 器 人 的 机 械
机 器 人 的 TCP 修正 下 图 所 示 的 4 点 而 进行
域 中 设 定 从 机 器 人 的 基本 举 可
TCP 之 后 , 以 [用 户 坐 标 系
下
未 示 教
下 教
示 教
7 和 一 Ooeoeegegeg@0O
000000000
000000000
坐标 原点 -|
斑 轴 始 点 一 党 X1
fi%fifi_’:fifim%&)\&fimbfi
在 机 器 人 的 工具 坐标
固定 在 固定 台 等
修正 下 图 所 示 的 6 点
系 区 域 设 定 从 机 器 人 的 机 械 接口 坐标 系
人 [工具 坐标 系 / 6 点 记录 (XZ)] 或 者
定 。
以 [工具 坐标 系 /6 录 CXZ)] 设 定 的 工具 能
于 修正 的 工具 入
, 在 双 的 值 中 手工 输入
对 于 希望 设 定 的 坐标 系 处 于 绕 着 和 轴 旋 转 90” 的
- 90 的 值 。
= 在 设 定 基
-465 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)