程序的示教
工业 自动 化 专家 CAD2D3D.com
和 视觉 程序
B-83304CM/04
o100 B
A
未 学 习
o
未 设 定
未 设 定
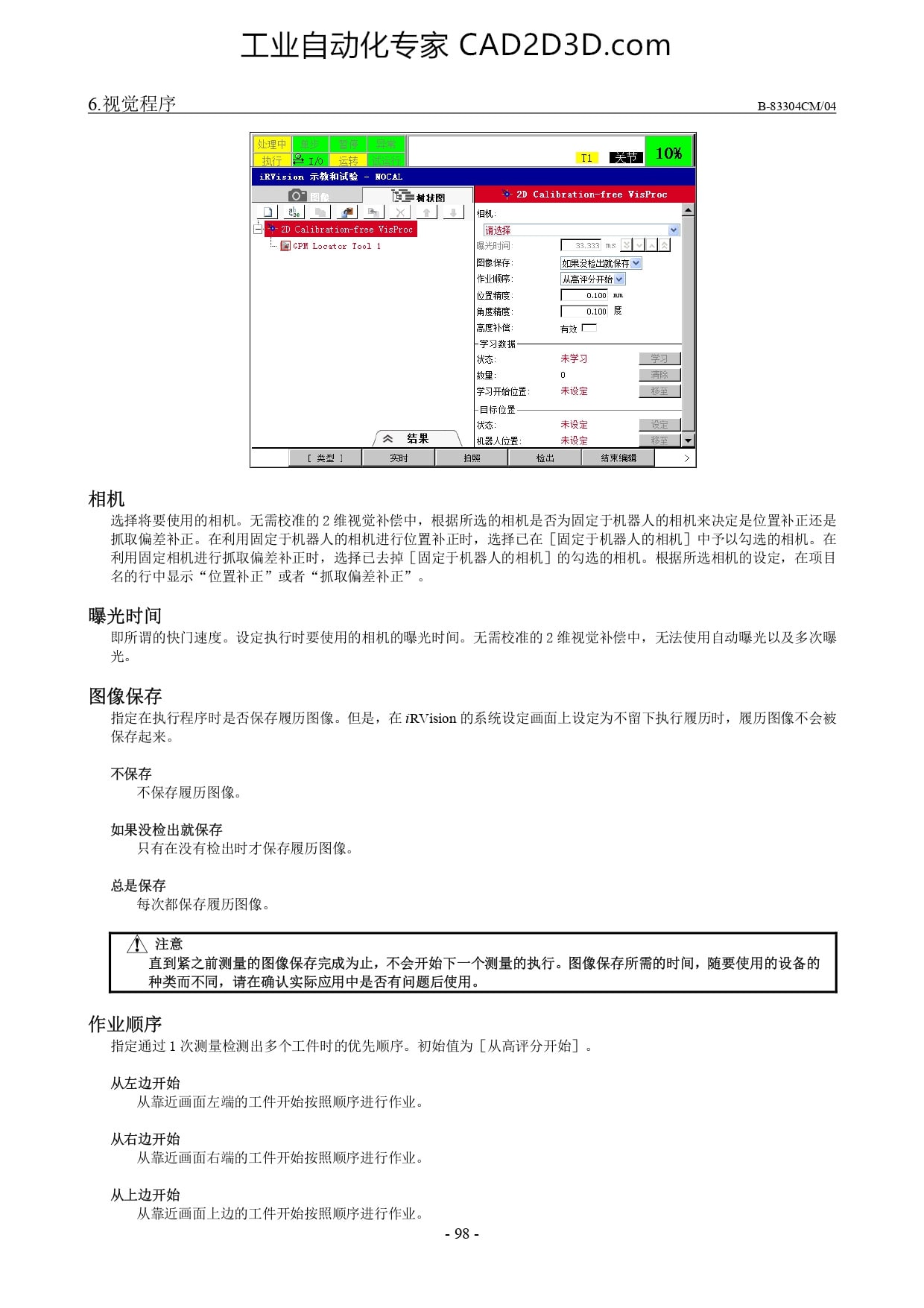
相机
选择 将 要 使 用 的 相机 。 无 需 校准 的 2 维 视觉 补偿 中 , 根 据 所 选 的 相机 是 否 为 固定 于 机 器 人 的 相机 来 决定 是 位 置 补正 还 是
抓 取 偏 差 补正 。 在 利用 固定 于 机 器 人 的 相机 进行 位 置 补正 时 , 选 择 已 在 [固定 于 机 器 人 的 相机 ] 中 了 予以 色 选 的 相机 。 在
利用 固定 相机 进行 抓 取 偏 差 补正 时 , 选 择 已 去 掉 [固定 于 机 器 人 的 相机 ] 的 色 选 的 相机 。 根 据 所 选 相机 的 设 定 , 在 项 目
名 的 行 中 显示 “位 置 补正 ”或 者 “ 抓 取 偏差 补正 ”。
曝光 时 间
即 所 谓 的 快门 速度 。 设 定 执行 时 要 使 用 的 相机 的 曝光 时 间 。 无 需 校准 的 2 维 视觉 补偿 中 , 无 法 使 用 自动 曝光 以 及 多 次 曝
光 。
图 像 保存
指定 在 执行 程序 时 是 否 保存 履历 图 像 。 但是, 在 逮 Vision 的 系统 设 定 画面 上
保存 起 来 。
为 不 留 下 执行 履历 时 , 履 历 图 像 不 会 被
不 保存
不 保存 履历 图 像 。
如 果 没 检 出 就 保存
只 有 在 没有 检 出 时 才 保 存 履历 图 像 。
总 是 保存
每 次 都 保存 履历 图 像 。
作业 顺序
指定 通过 1 次 测量 检测 出 多 个 工件 时 的 优先 顺序 。 初 始 值 为 【从 高 评分 开始 ] 。
从 左边 开始
从 靠近 画面 左 端的 工件 开始 按照 顺序 进行 作业 。
从 右边 开始
从 靠近 画面 右 端的 工件 开始 按照 顺序 进行 作业 。
从 上 边 开 始
从 靠近 画面 上 边 的 工件 开始 按照 顺序 进行 作业 。
- 98-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)