检出数量、处理时间、检出结果表
工业 自动 化 专家 CAD2D3D.com
HE
R
6. MR
位 置 相 正
于
记 Ses ne 3 v[[4]
R ]
设 证 宇 了 E |;I
BEBE: 2 ¢ w W M| K6 BED| WA WERE| K|
处 理 时 间 : 2 1 00 1520 0078
2 326928 16472 -399| s L 6 455 0170
[类 型 1 ) 的 由 s 结束 编辑 >
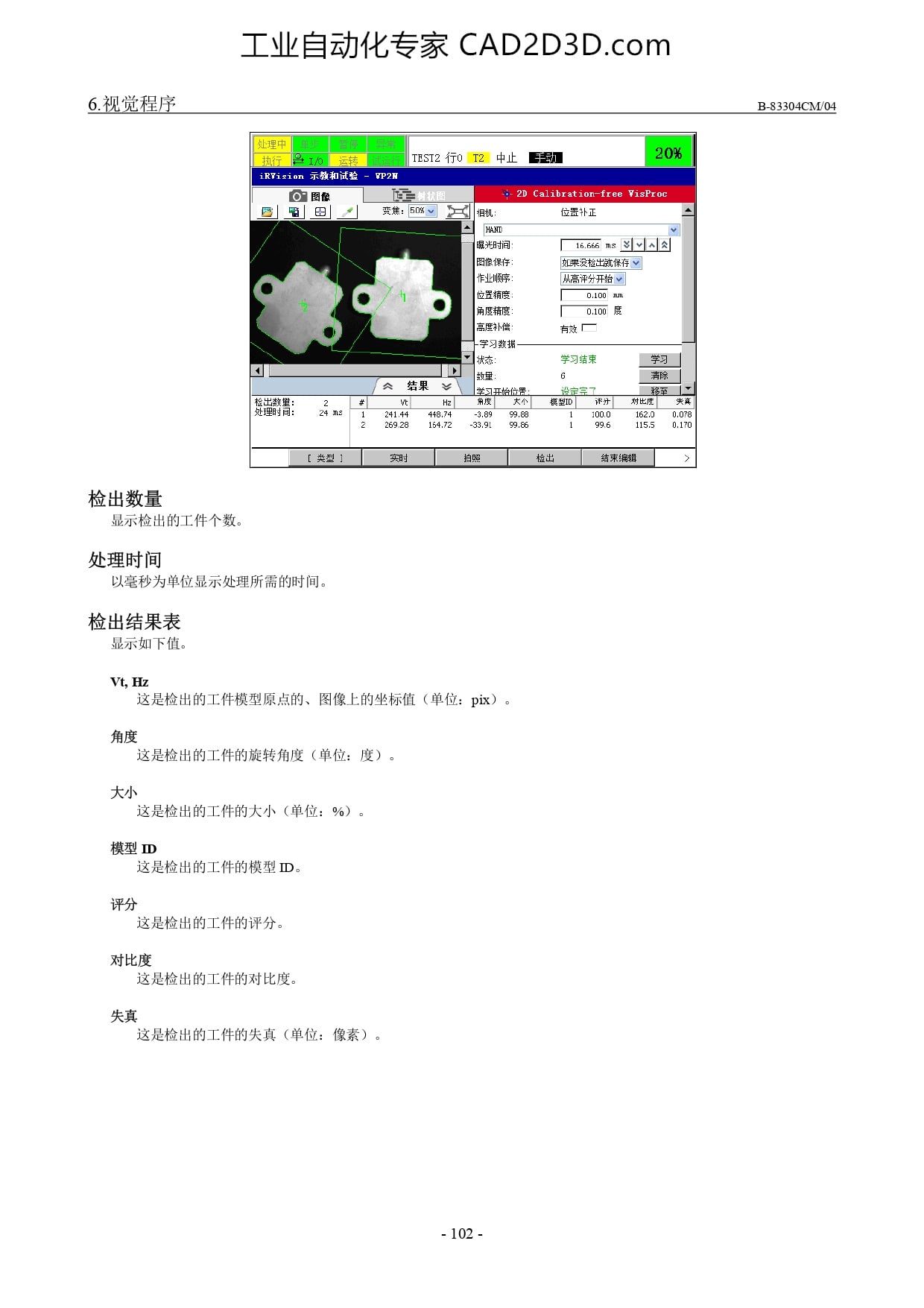
检 出 数量
显示 检 出 的 工件 个 数 。
处 理 时 间
以 毫秒 为 单位 显示 处 理 所 需 的 时 间 。
检 出 结果 表
显示 如 下 值 。
Vb Hz
这 是 检 出 的 工件 模 下 的 、 图 像 上 的 坐标 值 〈 单 位 : pix) 。
角度
这 是 检 出 的 工件 的 旋转 角度 〈 单 位 : 度 ) 。
大 小
这 是 检 出 的 工件 的 大 小 〈 单 位 : %) 。
模型 ID
这 是 检 出 的 工件 的 模型 ID 。
评分
这 是 检 出 的 工件 的 评分 。
对 比 度
这 是 检 出 的 工件 的 对 比 度 。
失真
这 是 检 出 的 工件 的 失真 〈 单 位: 像素
-102 -
B-83304CM/04
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)