应用研讨、检测的对象、相机的配置
工业 自动 化 专家 CAD2D3D.com
和 视觉 程序 B-83304CM/04
此 程序 中 ,“ 相 机 视图 ”这 一 工具 被 配置 在 视觉 程序 之 下 。 一 个 相机 视图 相当 于 一 个 测量 部 位 。 相 机 视图 数量 为 3 个 ,
无 法 进行 数量 的 变更 。
6.5.1 应 用 研讨
这 里 就 检测 的 对 象 、 相 机 的 配置 等 进行 研讨 。
6.5.1.1 。 检测 的 对 象
要 决定 检测 对 象 , 需 要 注意 如 下 事项 。
。 ”应 能 根据 图 纸 等 正确 计算 出 3 个 检测 对 象 的 相对 的 位 置 关系 。
。 3 个 检测 对 象 的 位 置 的 相对 关系 不 应 有 个 体 差 异 。
。 3 个 检测 对 象 和 机 器 人 发 挥 作用 的 工件 上 的 作业 部 位 的 相对 关系 不 应 有 个 体 差异 。
。 应 以 能 够 覆盖 整个 工件 的 方式 取 离 开 较 远 测 对 象 。
以 3 个 检测 对 象
检测 对 象 的 目 视
车 身 的 情况 下 , 被 称 作 定 位 孔 的 基准 孔 适用 于 检测 对 象
6.5.1.2 。 相机 的 配置
决定 相机 视野
以 即使 在 检测 对 象 最 大 限 偏离 的 情况 下 检测 对 象 也 不 偏离 视野 的 方式 决定 相机 视野 的 广度 。 相 机 视野 太 大 时 , 有 的 情况
下 得 不 到 所 需 的 补正 精度 。
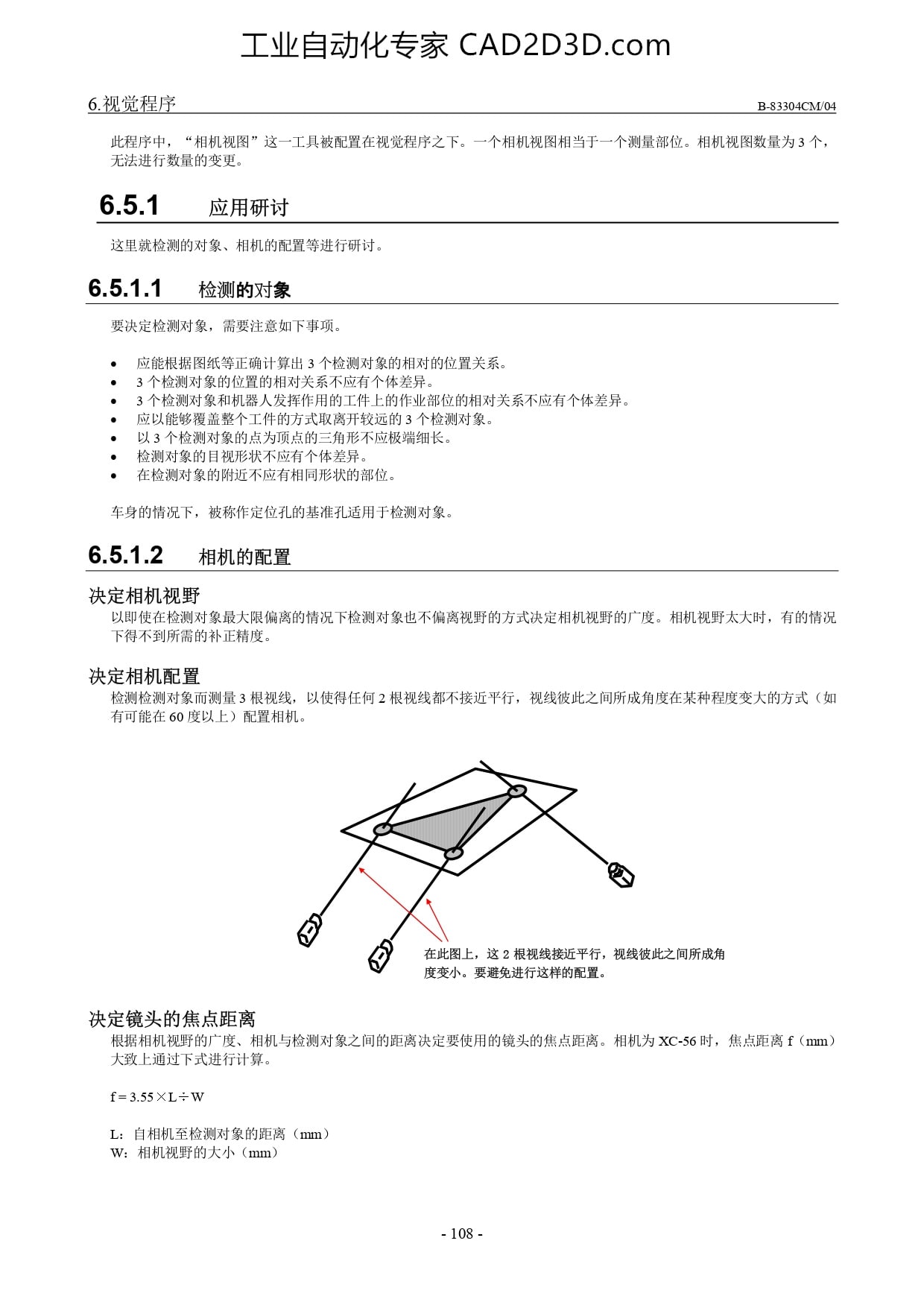
决定 相机 配置
检测 检测 对 象 而 测量 3 根 视线 , 以 使 得 任何 2 根 视线 都 不 接近 平行 , 视 线 彼此 之 间 所 成 角度 在 某 种 程度 变 大 的 方式 〈 如
有 可 能 在 60 度 以 上 ) 配置 相机 。
办
人 秦 在 此 图 上 , 这 2 根 视线 接近 平行 , 视 线 彼此 之 间 所 成 角
度 变 小 。 要 避免 进行 这 样 的 配置 。
决定 镜头 的 焦点 距离
根据 相机 视 量 的 广度 、 相 机 与 检测 对 象 之 间 的 距离 决定 要 使 用 的 镜头 的 4
大 致 上 通过 下 式 进 行 计算 。
距离 。 相 机 为 XC-56 时 , 焦 点 距离 f (mmy)
f=355XL+W
L: 自 相 机 至 检测 对 象 的 距离 (mmy)
W: 相机 视野 的 大 小 (mmy)
-108 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)