图像运算工具
工业 自动 化 专家 CAD2D3D.com
7 命令 行 工具 B-83304CM/04
从 TP 程序 执行 IRVSNAP, 将 图 像 存储 在 图 像 天 存 器 中 。
点 亮 另外 一 个 照明 。
在 [输入 图 像 1] 中 选择 [拍摄 图 像 ] 。
在 [输入 图 像 2] 中 选择 [图
在 [演算 ] 中 选择 [最 大 ] 。
中 hwN
TEST 行 0 TL fubt B 启
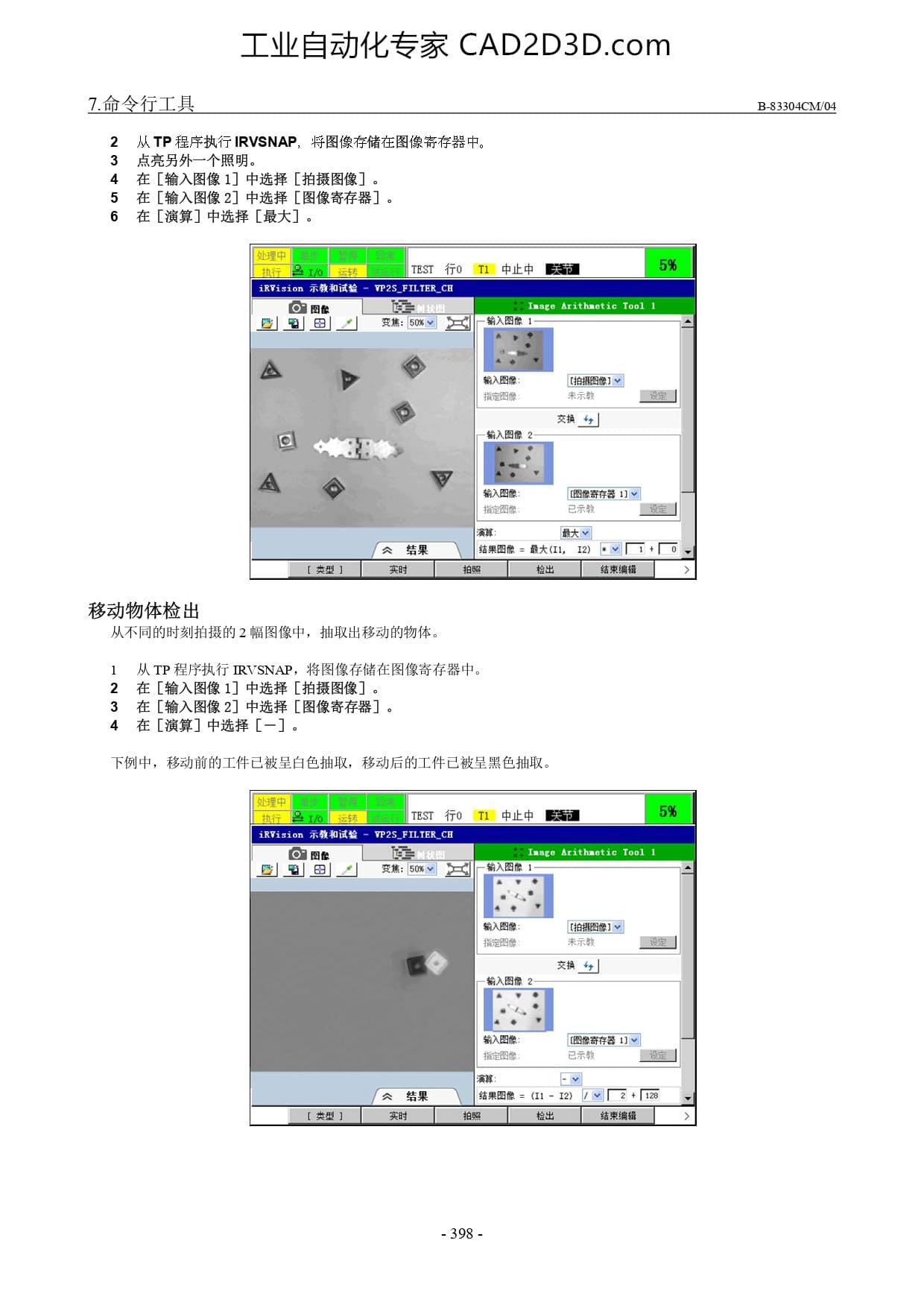
移动 物体 检 出
从 不 同 的 时 刻 拍摄 的 2 幅 图 像 中 , 抽 取出 移动 的 物体 。
1 A TP 程序 执行 节 VSNAP, 将 图 像 存 储 在 图 像 寄 存 器 中 。
2 在 [输入 图 像 1] 中 选择 [拍摄 图 像 ] 。
3 在 [输入 图 像 2] 中 选择 [图像 寄 存 器 ] 。
4 在 [演算 ] 中 选择 [一 ] 。
下 例 中 , 移 动 前 的 工件 已 被 呈 白 色 抽取 , 移 动 后 的 工件 已 被 呈 黑 色 抽取 。
TEST {70 T1 fubd B 语
[oTTY =
| ®| B | Flsonv] p[-EABE 4
输入 图 从 (HaMER) v
.
AN css
会” 结果 结果 图 像 = (I! - I2) (e[ z2+[@ 局
[类 型 ] 实时 拍照 i 结束 编辑 >
-398 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)