补正方法、结合误差阈值、图像保存、基准位置的状态、重心位置 X, Y, Z、补正量确认
工业 自动 化 专家 CAD2D3D.com
和 6. 视觉 程序 B-83304CM/04
补正 方法
选择 机 器 人 的 补正 方法 。3 台 相 机 的 3 维 补正 中 , 只 可 使 用 位 置 补正 。 计 算 位 置 补 正 用 的 补偿 数据 。
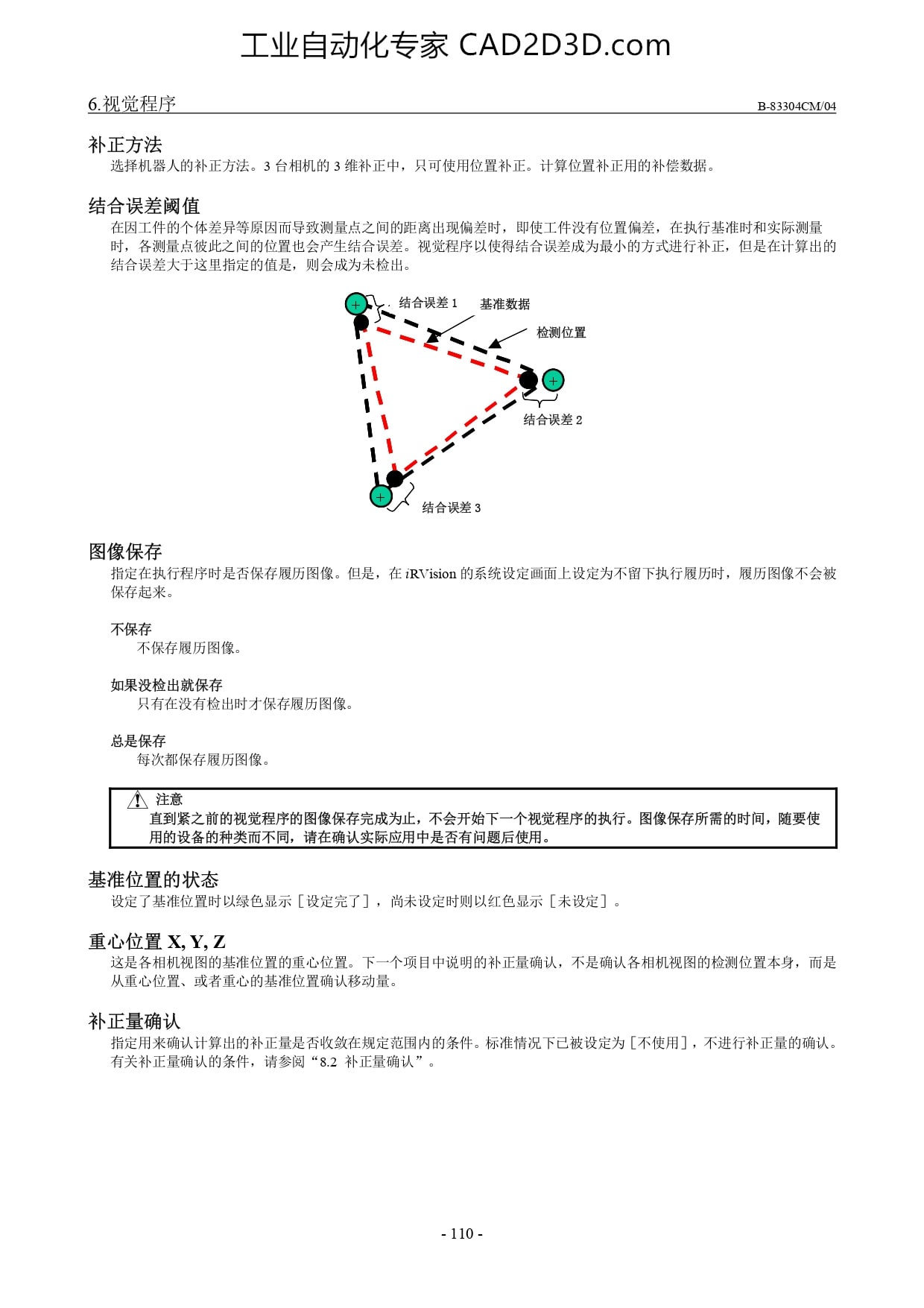
结合 误差 阔 值
下 国生 的 人 休 关 二 四 三 玖 天 二 之 间 的 距离 出 现 偏差 时 , 即 使 工件 没有 位 置 偏差 , 在 执行 基准 时 和 实际 测量
测量 点 彼此 之 间 的 位 置 也 会 产生 结合 误差 。 视 觉 程序 以 使 得 结合 误差 成 为 最 小 的 方式 进行 补正 , 但 是 在 计算 出 的
大 于 这 里 指定 的 值 是 , 则 会 成 为 未 检 出 。
多
全 ~
\ ~
1 80
1 7
1) A] 结合 误差 2
v 27
LisZ
图 像 保存
指定 在 执行 程序 时 是 否 保存 履历 图 像 。 但是, 在 认 Vision 的 系统 设 定 画面 上 设 定 为 不 留 下 执行 履历 时 , 履 历 图 像 不 会 被
保存 起 来 。
不 保存
不 保存 履历 图 像 。
如 果 没 检 出 就 保存
只 有 在 没有 检 出 时 才 保 存 履 历 图 像 。
总 是 保存
每 次 都 保存 履历 图 像 。
前 的 视觉 程序 的 图 像 保存 完成 为 止 , 不 会 开始 下 一 个 视觉 程序 的 执行 。 图 像 保存 所 需 的 时 间 , 随 要 使
用 的 设备 的 种 类 而 不 同 , 请 在 确认 实际 应 用 中 是 否 有 问题 后 使 用 。
基准 位 置 的 状态
设 定 了 基准 位 置 时 以 绿色 显示 [ 设 定 完了 ] , 尚 未 设 定时 则 以 红色 显示 [未 设 定 ] 。
重心 位 置 X, Y, Z
这 是 各 相机 视图 的
从 重心 位 置 、 或 者 重 ,
补正 量 确认
必定 用 来 确认 计算 出 的 补正 量 是 否 收敛 在 规定 范围 内 的 条 件 。 标准 情 况 下 已 被 设 定 为 [不 使 用 ] , 不 进行 补正 量 的 确认 。
有 关 补正 量 确认 的 条 件 , 请 参阅 “8.2 补正 量 确认 ”。
准 位 置 的 位 置 。 下 一 个 项 目 中 说 明 的 补正 量 确认 , 不 是 确认 各 相机 视图 的 检测 位 置 本 身 , 而 是
心 的 基准 位 置 确认 移动 量 。
-110 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)