基准位置的设定
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 6. 视 觉 程 序
结合 误差
这 是 设 定 基准 位 置 时 的
测 误差 , 结 合 误差 几乎 为
误差 指标
各 相机 的 检测 误差, 是 表示 对 补正 精度 产生 多 大 程
点 、 和 进行 试验 时 的 检测 点 的 结合 误差 〈 单 位 , mm) 。 若 检测 对 象 间 无 个 体 差异 , 且 无 检
度 影响 的 指标 , 表 示 此 值 越 大 检测 误差 就 越 容 易 影响 补正 精度 。 璧 如 ,
此 值 为 8.0 mmy/pix 时 , 表 示 若 有 0.1 pix 的 检测 误差 , 补 正 精度 有 可 能 存在 8.0 X 0.1= 0.8 mm 左右 的 偏差 。 补 正 精度
除 此 以 外 过 各 种 影响 , 因 而 不 能 仅 从 此 指 则 补正 精度 , 但 是 在 此 值 不 符合 要 求 规格 时 , 建 议 用 户 对 相机 的 配
置 、 要 检测 的 对 象 位 置 、 相 机 视野 尺寸 等 进行 再 度 研讨 。
处 理 时 间
以 毫秒 为 单位 显示 处 理 所 需 的 时 间 。
检 出 结果 表
显示 如 下 值 。
XY,z
这 是 检 出 的 检测 对 象 的 模型 原点 的 、 通 过 相机 校准 而 指定 的 基准 坐标 系 中 的 坐标 值 〈“ 单 位 , mm) 。
模型 ID
这 是 检 出 的 工件 的 模型 ID 。
评分
这 是 检 出 的 工件 的 评分 。
相机 距离
这 是 相机 和 检测 出 的 检测 对 象 的 模型 原点 的 距离 〈 单 位 : mm) 。
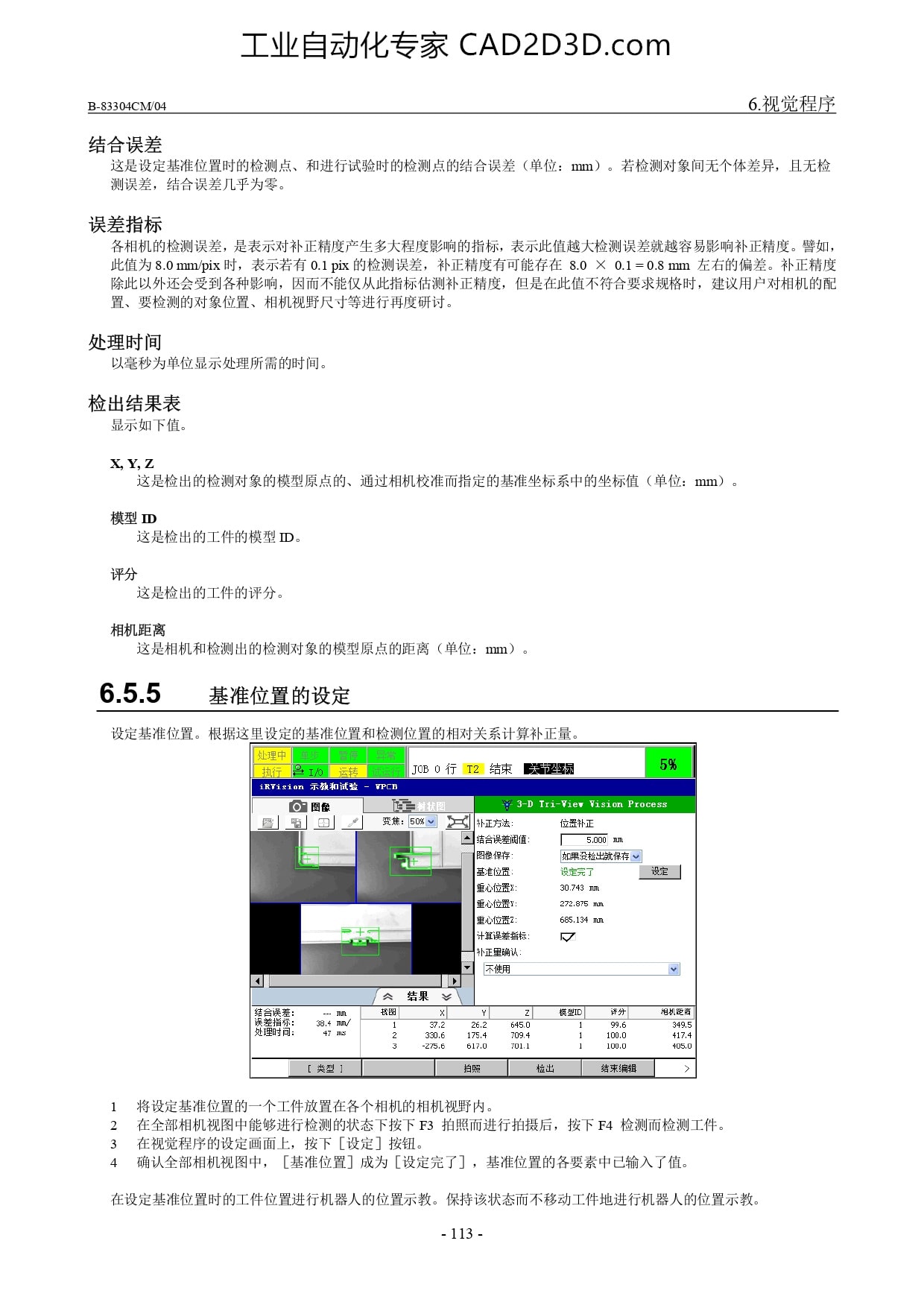
6.5.5 ”基准 位 置 的 设 定
设 定 基准 位 置 。 根 据 这 里 设 定 的 基准 位 置 和 检测 位 置 的 相对 关系 计算 补正 量 。
Jo 行 了 2 结 订 BEESR
) S G e
位 置 补正
5w m
[t v
设 定 完了
074 加
e
27275 mm
685134 nn
~
—m £ ¥ 7 z BED] W e
o 38.4 TV 1 72 zm2 es0 T wme 3495
A 和 可 2 206 1754 7094 1 1000 #74
3 zme ewo WLl 1 lo 4050
[类 型 1 的 照 检 出 结束 编辑 >
将 设 定 基准 位 置 的 一 个 工件 放置 在 各 个 相机 的 相机 视野 内 。
在 全 部 相机 视图 中 能 够 进行 检测 的 状态 下 按 下 F3 拍照 而 进行 拍摄 后 , 按 下 F4 检测 而 检测 工件 。
在 视觉 程序 的 设 定 画面 上 , 按 下 [ 设 定 ] 按钮 。
确认 全 部 相机 视图 中 , [基准 位 置 ] 成 为 设 定 完了 ] , 基 准 位 置 的 各 要 素 中 已 输入 了 值 。
wb
在 设 定 基准 位 置 时 的 工件 位 置 进行 机 器 人 的 位 置 示 教 。 保 持 该 状态 而 不 移动 工件 地 进行 机 器 人 的 位 置 示 教 。
-113 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)