程序命令
工业 自动 化 专家 CAD2D3D.com
2 从 机 器 人 启动
B-83304CMI04
TEST 470 Bl it
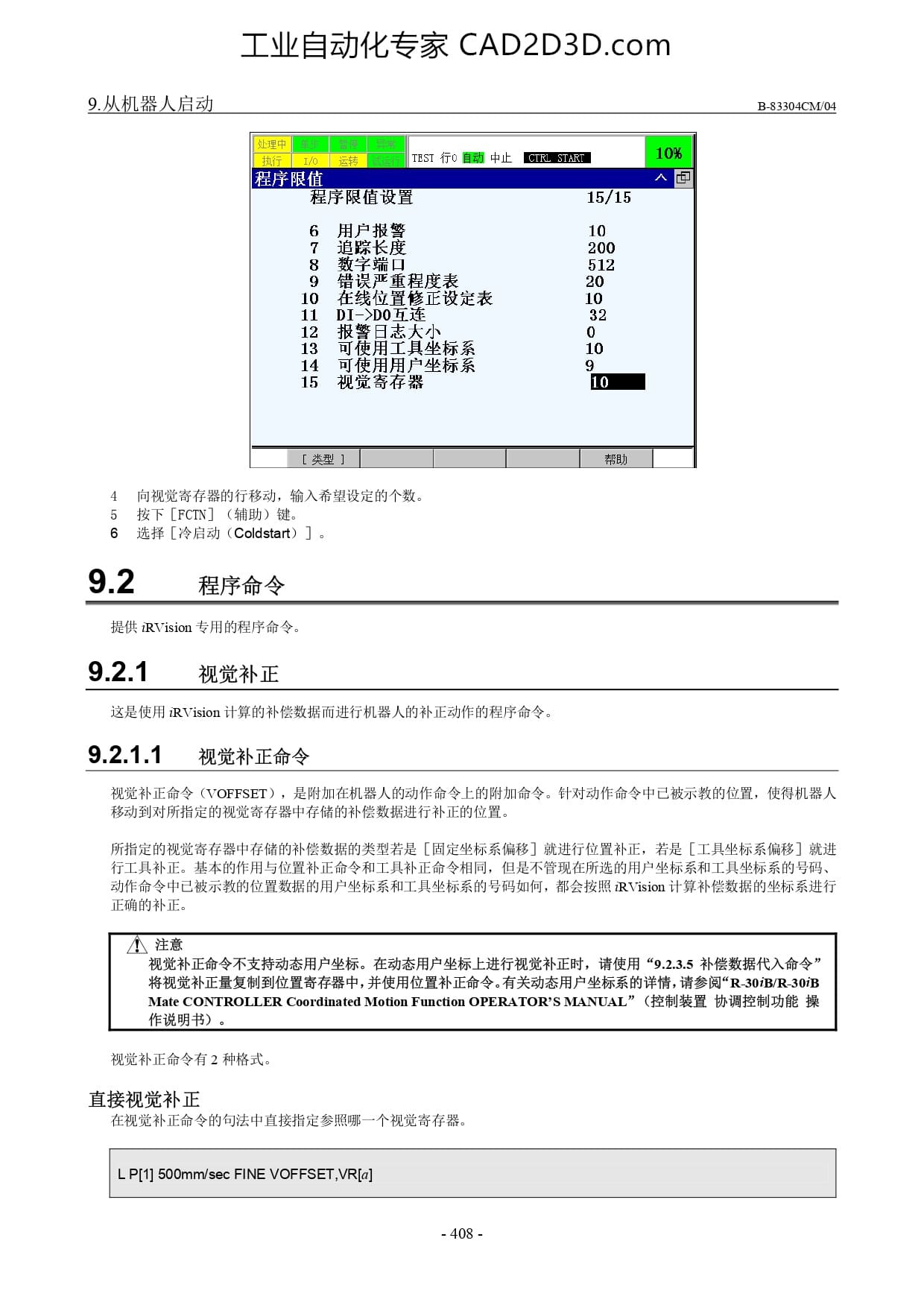
4 ”向 视觉 寄存 器 的 行 移动 , 输 入 希望 设 定 的 个 数 。
5 按 下 [FCIN] (辅助 ) 键 。
6 选择 [ 冷 启动 (Coldstart) ] -
9.2 程序 命令
提供 衣 Vision 专用 的 程序 命令
HI
9.2.1 视觉 补 了
这 是 使 用 退 Vision 计算 的 补偿 数据 而 进行 机 器 人 的 补正 动作 的 程序 命令 。
9.2.1.1 ”视觉 补正 命令
视觉
#3
正 命令 (VOFFSET) , 是 附加 在 机 器 人 的 动作 命令 上 的 附加 命令 。 针 对 动作 全
对 所 指定 的 视觉 寄存 器 中 存储 的 补偿 数据 进行 补正 的 位 置 。
命令 中 已 被 示 教 的 位 置 , 使 得 机 器 人
所 指定 的 视觉 寄存 器 中 存储 的 补偿 数据 的 类
行 工具 补正 。 基 本 的 作用 与 位 置 补 正 全
动作 命令 中 已 被 示 教 的 位 置 数据 的 用 户
正确 的 补正 。
人 入 注意
视觉 补正 命令 不 支持 动态 用 户 坐 标 。 在 动态 用 户 坐标 上 进行 视觉 补正 时 , 请 使 用 “9.2.3.5 补偿 数据 代入 命令
将 视觉 补正 量 复制 到 位 置 寄 存 器 中 , 并 使 用 位 置 补正 命令 有关 动态 用 户 坐 标 系 的 详情 , 请 参阅 “R-30iB/R-30i
Mate CONTROLLER Coordinated Motion Function OPERATOR'S MANUAL” (控制 装置 协调 控制 功能 操
作 说 明 书 ) 。
视觉 补正 命令 有 2 种 格式 。
直接 视觉 补
在 视觉 补正 命令 的 句法 中 直接 指定 参照 哪 一 个 视觉 寄存 器 。
m
L P[1] 500mmsec FINE VOFFSET,VR[4]
-408 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)