取得判别结果命令 取得读取结果命令 设定基准位置命令 校准相机命令
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 9. 从 机 器 人 局 动
9.2.2.4 ”取得 判别 结果 命令
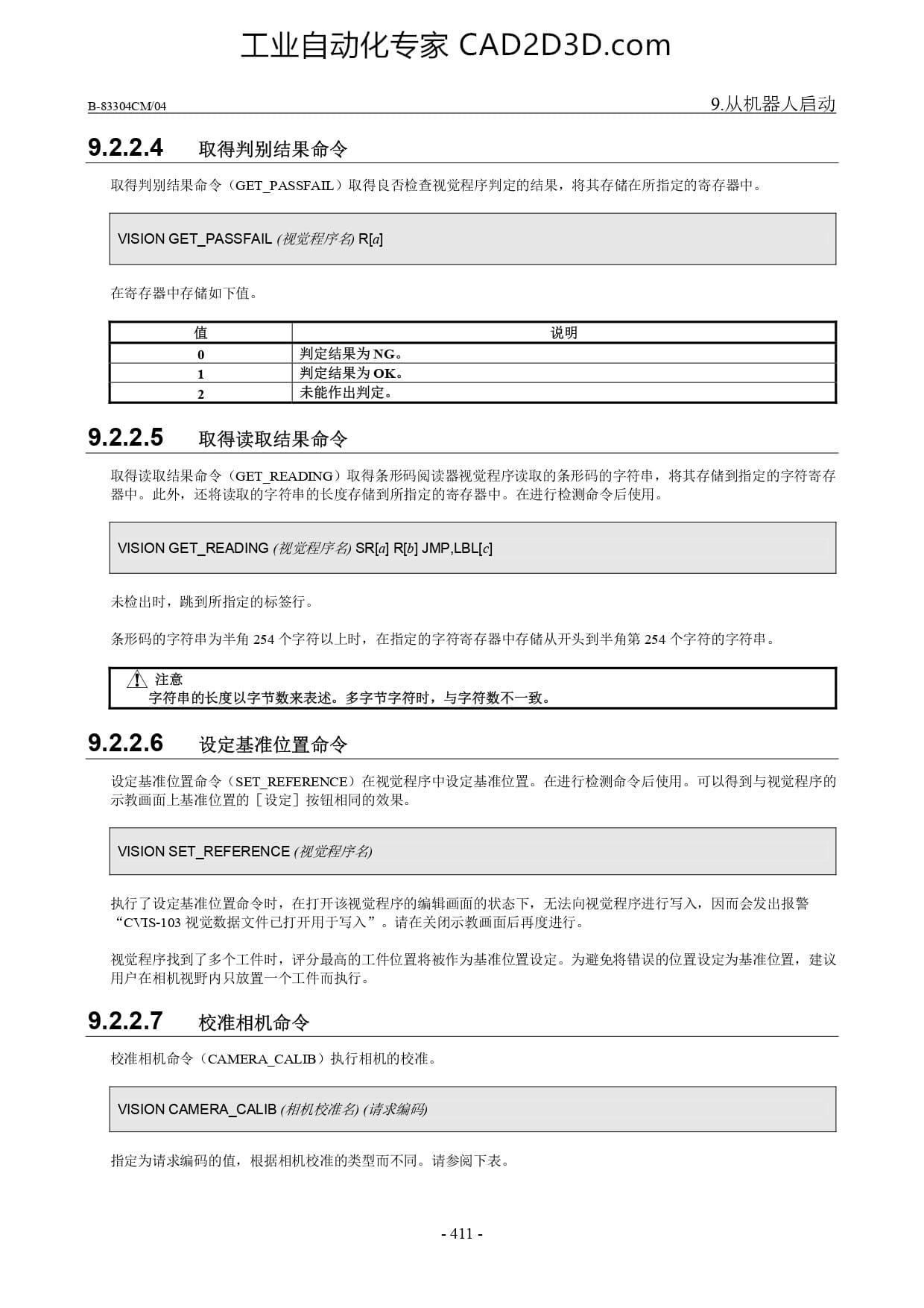
取得 判别 结果 命令 (GET PASSFAIL ) 取得 良 否 检查 视觉 程序 判定 的 结果 , 将 其 存储 在 所 指定 的 寄存 器 中 。
VISION GET_PASSFAIL (24 #/7#) Rla]
在 寄存 器 中 存储 如 下 值 。
判定 结果 为 NG。
判定 结果 为 OK。
未 能 作出 判定 。
9.2.2.5 ”取得 读 取 结 果 命令
取得 读 取 结果 命令 (GET_ READING) 取得 条 形 码 上
器 中 。 此 外 , 还 将 读 取 的 字符 串 的 长 度 存储 到 所 指定 的
符 串 , 将 其 存储 到 指定 的 字符 寄存
视觉 程序 读 取 的 条 形 码 的 字 :
命令 后 使 用 。
寄存 器 中 。 在 进行 检测
VISION GET_READING (#{/4/4/##7) SRla] R[5] JMP LBLc] |
未 检 出 时 , 跳 到 所 指定 的 标签 行 。
条 形 码 的 字符 串 为 半角 254 个 字符 以 上 时 , 在 指定
字符 寄存 器 中 存储 从 开头 到 半角 第 254 个 字符 的 字符 串 。
符 串 的 长 度 以 字 节 数 来 表述 。 多 字 节 字符 时 , 与 字符 数 不 一 致 。
9.2.2.6 。 设 定 基准 位 置 命令
设 定 基准 位 置 命令 (SET _ REFERENCE) 在 视觉 程序 中 设 定 基 准 位 置 。 在 进行 检测 命令 后 使 用 。 可 以 得 到 与 视觉 程序 的
示 教 画面 上 基准 位 置 的 【 设 定 ] 按钮 相同 的 效果 。
VISION SET_REFERENCE (#/5#/7 %)
执行 了 设 定 基准 位 置 命令 时 , 在 打开 该 视觉 程序 的 编 和
“CVTS-103 视觉 数据 文件 已 打开 用 于 写 入 ”。 请 在 关
序 进 行 写 入 , 因 而 会 发 出 报警
视觉 程序 找到 了 多 个 工件 时 , 评 分 最 高 的 工件 位 置 将 被 作为 基准 位 置 设 定 。 为 避免 将 错误 的 位 置 设 定 为 基准 位 置 , 建 议
用 户 在 相机 视野 内 只 放置 一 个 工件 而 执行 。
9.2.2.7 校准 相机 命令
校准 相机 命令 CAMERA_CALIB ) 执行 相机 的 校准 。
VISION CAMERA_CALIB (#7p1 {21t #) (i K4ii%)
指定 为 请 求 编码 的 值 , 根 据 相 机 校准 的 类 型 而 不 同 。 请 参阅 下 表 。
-411-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)