KAREL程序的使用
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 9. 从 机 器 人 局 动
1024x768 768
1280x 1024 = 1280
1280 x 480 = 60
640 x 960 = 60
。。 彩色 数码 相机
640x 480 = 1200
1024x 768 = 2304
。 模拟 相机 = 300
。 立体 传感器 = 1500
IRVSNAP
在 指定 的 视觉 程序 的 拍摄 条 件 下 进行 拍摄 , 将 拍摄 的 图 像 存储 到 图 像 寄存 器 中 。 此 外 , 还 将 指定 的 视觉 程序 的 检 出 所 需
的 数据 〈 相 机 为 固定 于 机 器 人 的 相机 时 的 机 器 人 位 置 等 ) 也 存储 到 图 像 用 已 存储 在 图 像 寄 存 器 中 的 图 像
而 进行 检 出, 使 用 后 面 说 明 IRVFIND. j# 34414 IRVSNAP £l IRVFIND, 检测 命令 (RUN_FIND) 同等 的
处 理 。
进行 与
此 KAREL 程序 取 如 下 参数 。
参数 1;, 视觉 程序 名
以 字符 串 来 指定 视觉 程序 名 。
参数 2; 相机 视图 号 码
多 台 相机 / 多 台 立 体 传感器 的 视觉 程序 时 , 指 定 相机 视图 的 号 码 。1 台 相 机 / 1 台 立 体 传感器 的 视觉 程序 时 , 请 指定
1.
参数 3; 图 像 寄 存 器 号 码
指定 存储 图 像 的 图 像 寄 存 器 的 号 码 。
IRVFIND
使 用 己 被 存储 在 图 像 寄存 器 中 的 图 像 而 执行 指定 的 视觉 和
耻 VSNAP。 通过 组 合 耻 VSNAP 和 下 VFIND, 进 行 与 进行 检 ,
的 检 出 。 要 将 图 像 存 储 在 图 像 寄存 器 中 时 , 使 用 刚才 说 明 的
则 命令 (RUN_FIND ) 同等 的 处 理 。
此 KKAREL 程序 取 如 下 参数 。
参数 1;, 视觉 程序 名
以 字符 串 来 指定 视觉 程序 名 。
参数 2;, 相机 视图 号 码
多 台 相 机 / 多 台 立 体 传感器 的 视觉 程序 时 , 指 定 相机 视图 的 号 码 。 1 台 相 机 / 1 台 立 体 传感器 的 视觉 程序 时 , 请 指定
1.
参数 3: 图 像 寄 存 器 号 码
指定 用 于 检 出 的 图 像 寄存 器 的 号 码 。
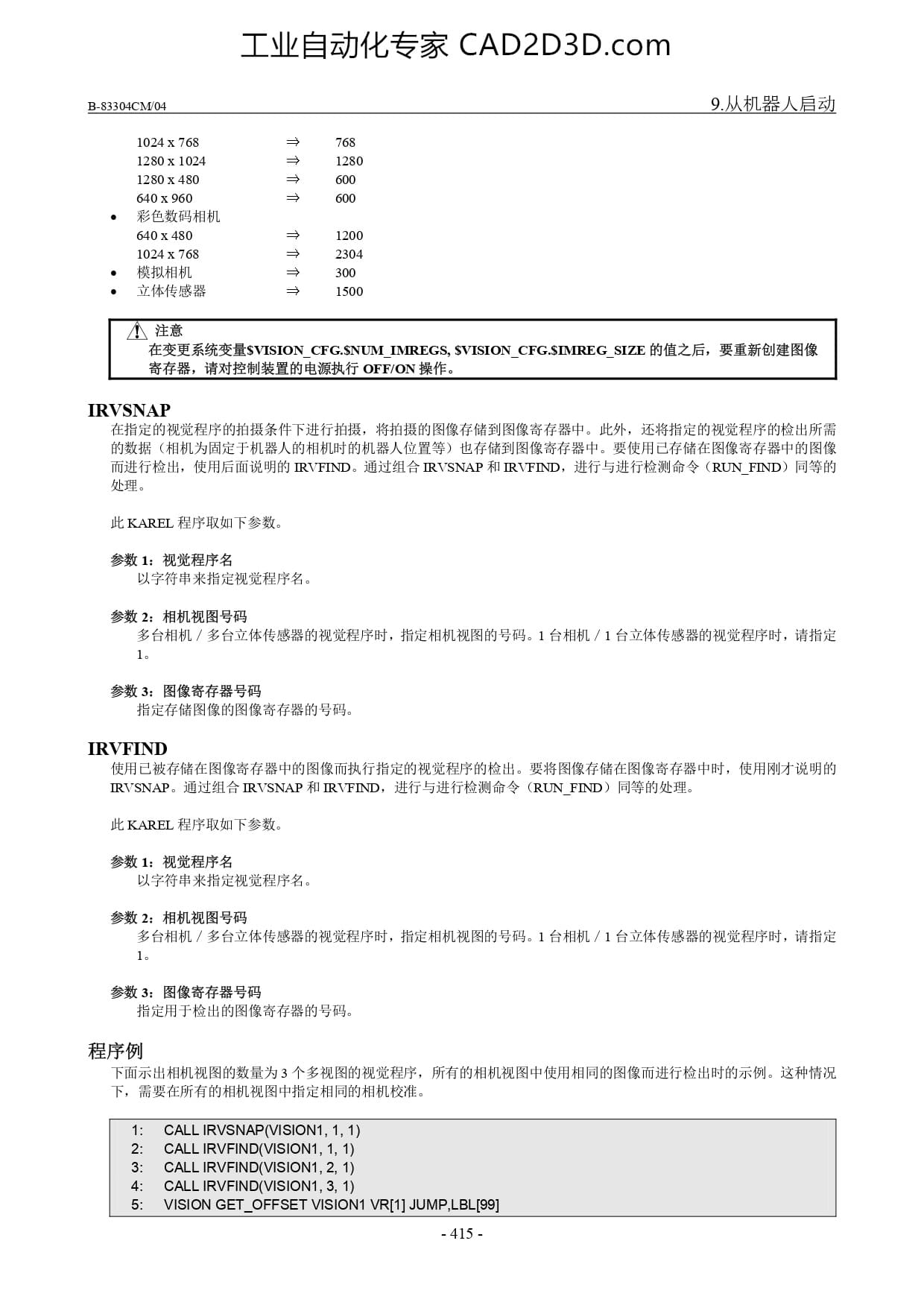
程序 例
下 面 示 出 相机 视图 的 数量 为 3 个 多 视图 的 视觉 程序 , 所 有 的 相机 视图 中 使 用 相同 的 图 像 而 进行 检 出 时 的 示例 。 这 种 情况
下 , 需 要 在 所 有 的 相机 视图 中 指定 相同 的 相机 校准 。
CALLIRVSNAP(VISION1, 1, 1)
CALL IRVFIND(VISION1, 1, 1)
CALL IRVFIND(VISION1, 2, 1)
CALL IRVFIND(VISION1, 3, 1)
VISION GET_OFFSET VISION1 VR[1] JUMP,LBL[99]
-415-
人
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)