关于 3 维分布图
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 9. 从 机 器 人 局 动
JEKAREL 程序 取 如 下 参数 。
参数 1, 传 感 器 名
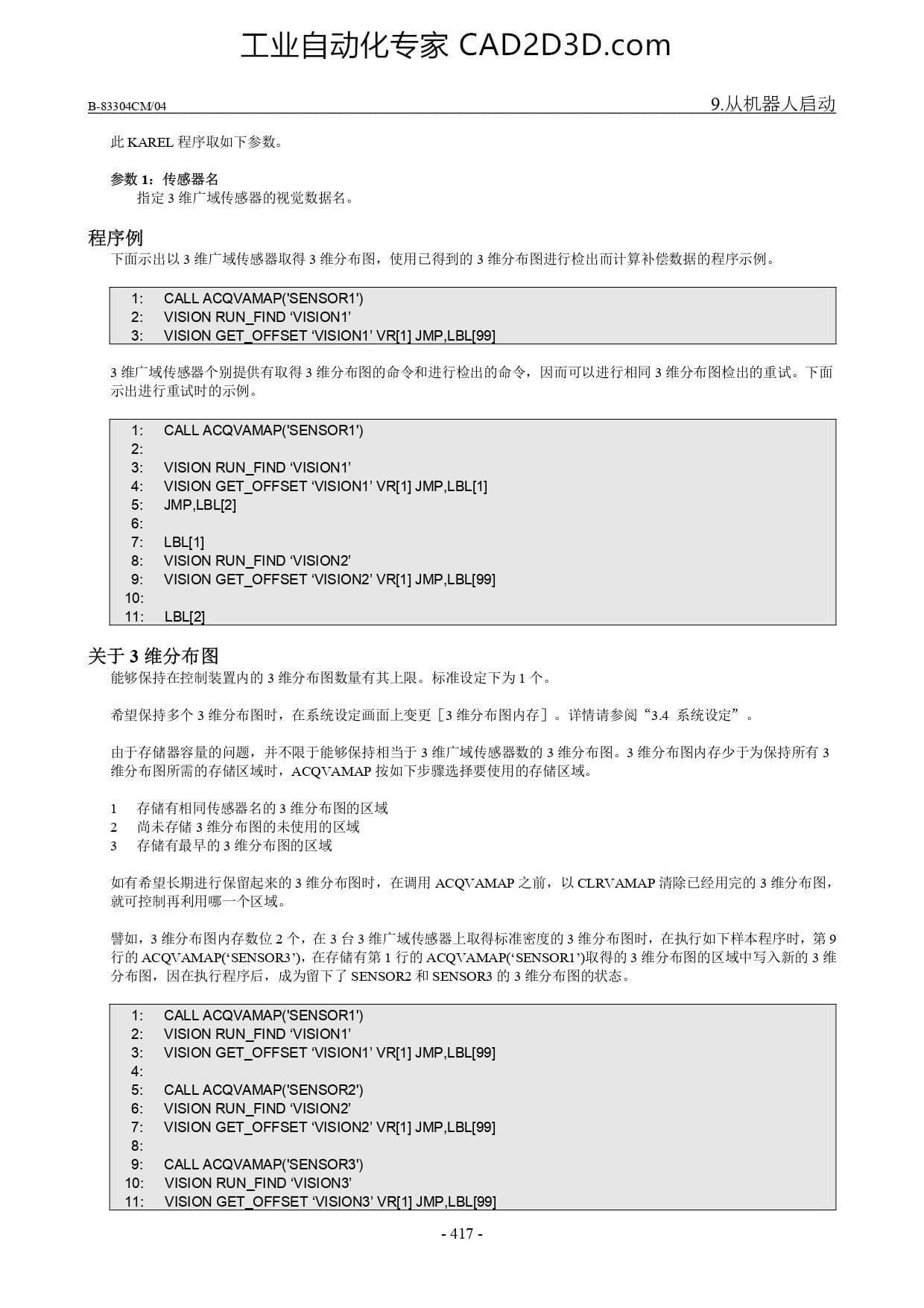
指定 3 维 广 域 传感器 的 视觉 数据 名 。
程序 例
下 面 示 出 以 3 维 广 域 传感器 取得 3 维 分 布 图 , 使 用 已 得 到 的 3 维 分 布 图 进行 检 出 而 计算 补偿 数据 的 程序 示例 。
1 CALLACQVAMAP(SENSOR1)
2: VISION RUN_FIND VISIONT
3: VISION GET_OFFSET ‘VISION1' VR[1] JMP,LBL[99]
3 维 广 域 传感器 个 别提 供 有 取得 3 维 分 布 图 的 命令 和 进行 检 出 的 命令 , 因 而 可 以 进行 相同 3 维 分 布 图 检 出 的 重 试 。 下 面
示 出 进行 重 试 时 的 示例 。
CALL ACQVAMAP('SENSOR1')
VISION RUN_FIND VISIONT'
VISION GET_OFFSET ‘VISION1’ VR[1] JMP,LBL[1]
JMP,LBLI2]
LBLI1]
VISION RUN_FIND VISION2,
VISION GET_OFFSET VISION2'VRI1] JMP,LBLI99]
ER EORGI AT IR
LBLI2]
关于 3 维 分 布 图
能 够 保持 在 控制 装置 内 的 3 维 分 布 图 数量 有 其
限 。 标 准 设 定 下 为 1 个 。
希望 保持 多 个 3 维 分 布 图 时 , 在 系统 设 定 画面 上 变更 【3 维 分 布 图 内 存 ] 。 详 情 请 参阅 “3.4 系统 设 定 ”。
由 于 存储 器 容量 的 问题 , 并 不 限于 能 够 保持 相当 于 3 维 广 :
维 分 布 图 所 需 的 存储 区 域 时 ,ACQVAMAP 按 如 下 步 机
感 器 数 的 3 维 分 布 图 。3 维 分 布 图 内 存 少 于 为 保持 所 有 3
要 使 用 的 存储 区 域 。
存储 有 相同 传感器 名 的 3 维 分 布 图 的 区 域
存储 3 维 分 布 图 的 未 使 用 的 区 域
存储 有 最 早 的 3 维 分 布 图 的 区 域
1
2
3
如 有 希望 长 期 进行 保留 起 来 的 3 维 分 布 图 时 , 在 调用 AcCQVAMAP 之 前 , 以 CLRVAMAP 清除 已 经 用 完 的 3 维 分 布 图 ,
就 可 控制 再 利用 哪 一 个 区 域 。
警 如 ,3 维 分 布 图 内 存 数位 2 个 , 在 3 台 3 维 广 域 传感器 上 取得 标准 密度 的 3 维 分 布 图 时 , 在 执行 如 下 样本 程序 时 ,第 9
1711 ACQVAMAP(*SENSOR3), 在 存储 有 第 1 行 的 ACQVAMAP('SENSOR1?) 取 得 的 3 维 分 布 图 的 区 域 中 写 入 新 的 3 维
分 布 图 , 因 在 执行 程序 后 , 成 为 留 下 了 SENSOR2 和 SENSOR3 的 3 维 分 布 图
CALL ACQVAMAP('SENSOR1')
VISION RUN_FIND VISIONT
VISION GET_OFFSET ‘VISION1’ VR[1] JMP,LBL[99]
CALL ACQVAMAP('SENSOR2)
VISION RUN_FIND ‘VISION2'
VISION GET_OFFSET ‘VISION2' VR[1] JMP,LBL[99]
CALL ACQVAMAP('SENSOR3')
VISION RUN_FIND VISION3'
VISION GET_OFFSET ‘VISION3' VR[1] JMP,LBL[99]
SO O ROROTE RGNS
-417-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)