IRVTRAIN
工业 自动 化 专家 CAD2D3D.com
9. 从 机 器 人 启动 B-83304CM/04
FHIW R4 1170 ACQVAMAP(‘SENSOR 1)1 3 维 分 布 图 时 , 如 下 列 程序 例 所 示 那 样 , 在 执行
ACQVAMAP('SENSOR3") 之 前 , 清 除 SENSOR2 的 3 维 分 布 图 (第 9 行 ) 。
CALL ACQVAMAP('SENSOR1')
VISION RUN_FIND VISIONT
VISION GET_OFFSET VISION1 VRI[1] JMP,LBL[99]
i1
2;
3
4:
5: CALL ACQVAMAP('SENSOR2')
6: VISION RUN_FIND VISION2
7: VISION GET_OFFSET VISION2 VRI[I1] JMP,LBL[99]
8
9: CALL CLRVAMAP('SENSOR2')
11: CALL ACQVAMAP('SENSOR3')
12: VISION RUN_FIND VISION3'
13:_VISION GET_OFFSET VISION3' VR[I1] JMP,LBL[99]
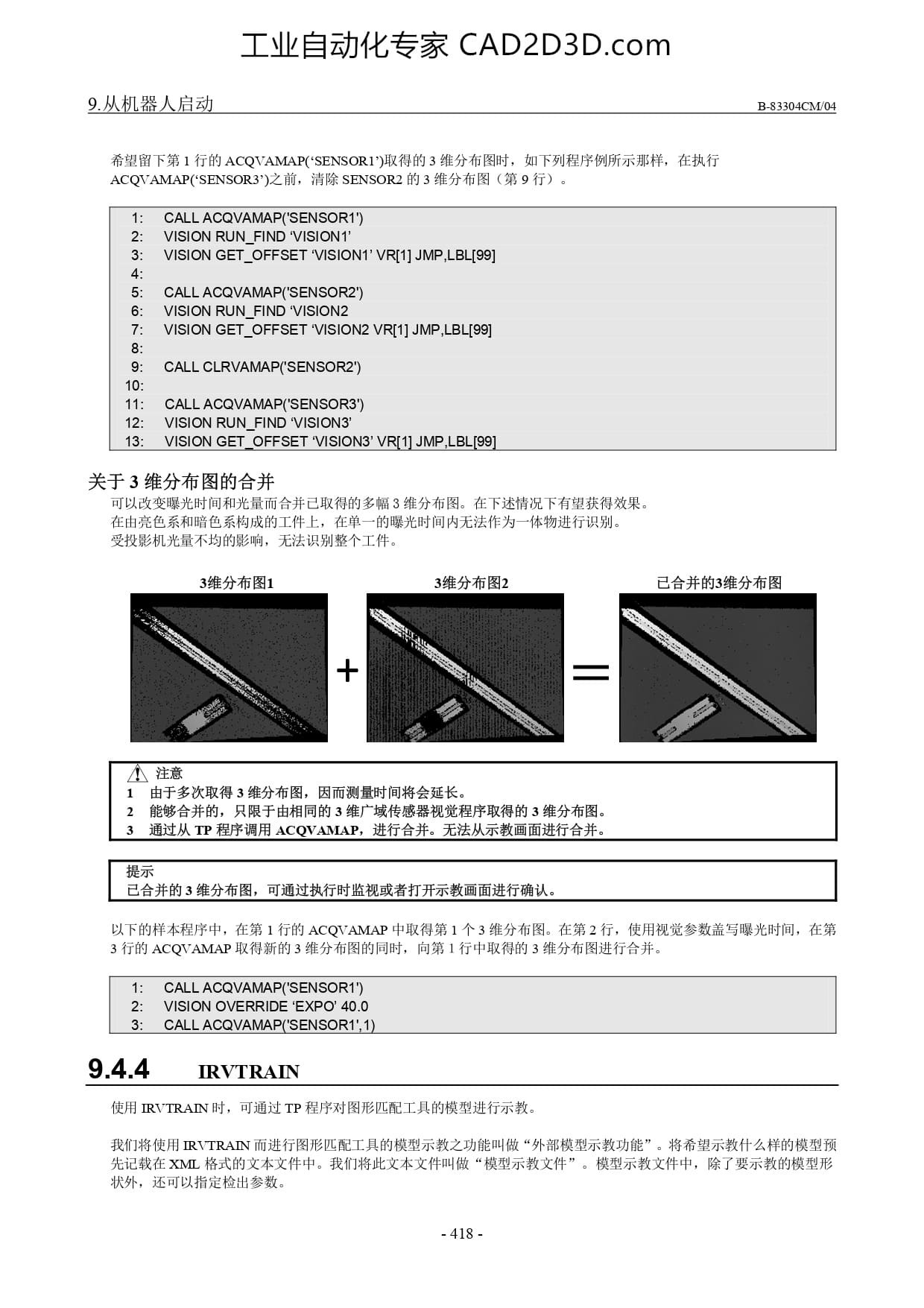
关于 3 维 分 布 图 的 合并
可 以 改变 曝光 时 间 和 光量 而 合并 已 取得 的 多 幅 3 维 分 布 图 。 在 下 述 情况 下 有 望 获得 效果 。
% 时 间 内 无 法 作为 一 体 物 进行 识别 。
在 由 亮色 系 和 暗色 系 构成 的 . 的 曝 :
不 均 的 影响 , 了
3 维 分 布 图 1 3 维 分 布 图 2 已 合并 的 3 维 分 布 图
注意
由 于 多 次 取得 3 维 分布 图 , 因 而 测量 时 间 将 会 延长 。
能 够 合并 的 , 只 限于 由 相同 的 3 维 广 域 传感器 视觉 程序 取得 的 3 维 分 布 图 。
通过 从 TP 程序 调用 ACQVAMNLAP, 进 行 合并 。 无 法 从 示 教 画面 进行 合并 。
以 下 的 样本 程序 中 ,在 第 1 行 的 AcQVAMAP 中 取得 第 1 个 3 维 分 布 图 。 在 第 2 行 , 使 用 视觉 曝光 时 间 , 在 第
3 行 的 ACQVAMAP 取得 新 的 3 维 分 布 图 的 同时 , 向 第 1 行 中 取得 的 3 维 分 布 图 进行 合并 。
1 CALLACQVAMAP(SENSOR1)
2: VISION OVERRIDE 'EXPO' 40.0
3: CALL ACQVAMAP('SENSOR1',1)
9.4.4 IRVTRAIN
使 用 耻 VTRAIN 时 , 可 通过 TP 程序 对 图 形 匹 配 工具 的 模型 进行 示 教 。
我 们 将 使 用 耻 VTRAIN 而 进行 图 形 匹 配 工 具 的
先 记载 在 XML 格式 的 文本 文件 中 。 我 们 将 此 文本 文件 叫做
状 外 , 还 可 以 指定 检 出
-418 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)