关于模型原点 固定于机器人的相机的情形
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 9. 从 机 器 人 局 动
相机 倾斜 设置 的 情形
图 像 坐标 系
补正 平面
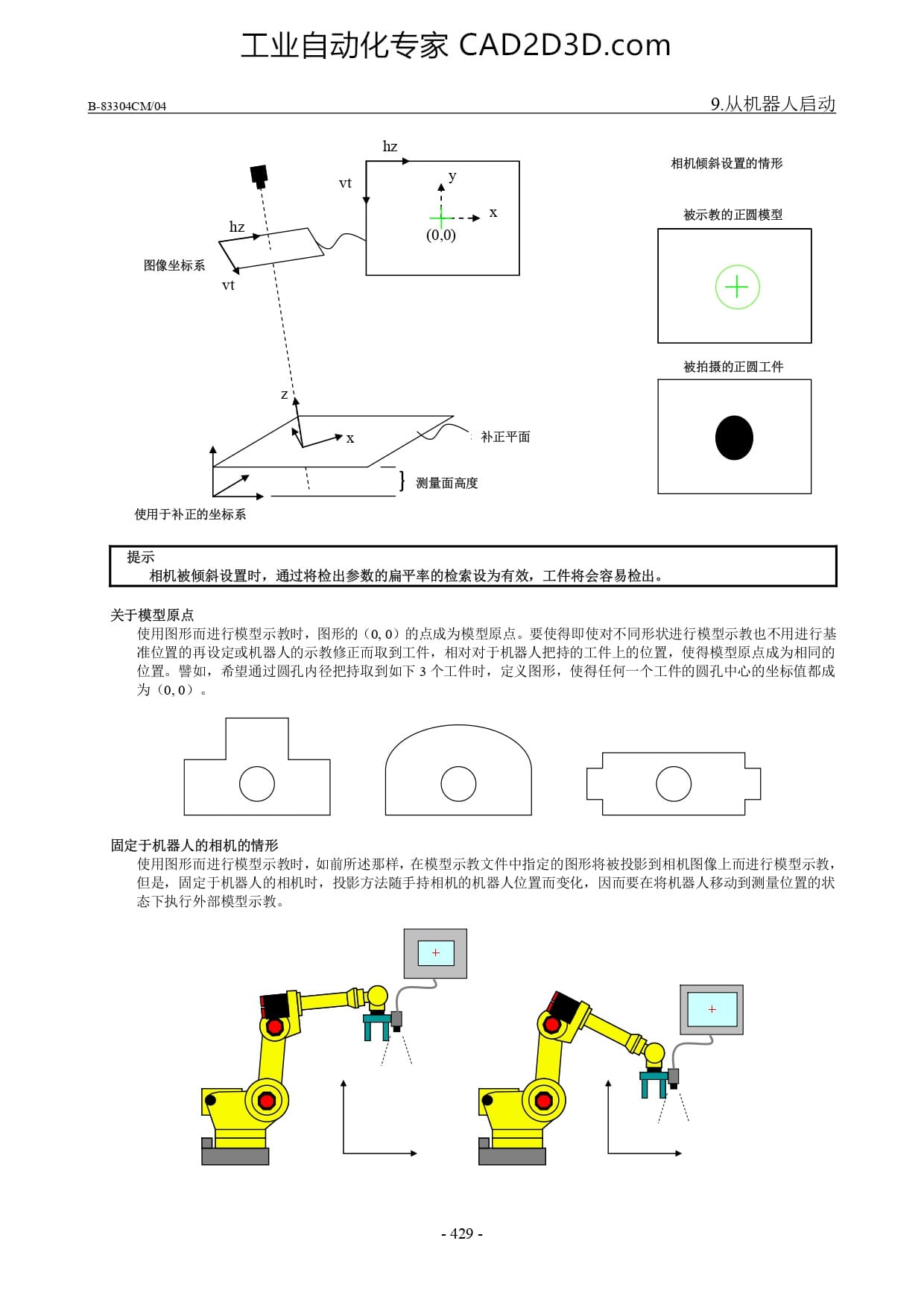
关于 模型 原点
使 用 图 形 而 :
位 置 。 辟 如, 希望
为 (0,0) 。
教 修正 而 取 到 工件 , 相 对 对 于 机 器 人 把
, 使 得
- 件 上 的 位 置
圆 孔 内 径 把 持 取 到 如 下 3 个 工件 时 , 定 义 图 形 , 使 得 任何 一 个 工件 的 圆 孔 中
么 点 成 为 相同 的
坐标 值 都 成
O
固定 于 机 器 人 的 相机 的 情形
使 用 图 形 而 进 行 模型 示 教 时 , 如 前 所 述 那样 , 在
但 是 , 固 定 于 机 器 人 让
目 机 时 , 投 影 方法 随手 扣
态 下 执行 外 部 模型 示 教 。
型 示 教 文件 中 指定 的 图 形 将 被 投影 到 相机 图 像 上 而 进行 模型 示 教 ,
目 机 的 机 器 人 位 置 而 变化 , 因 而 要 在 将 机 器 人 移动
-429 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)