BPGETOBB
工业 自动 化 专家 CAD2D3D.com
9. 从 机 器 人 局 动 B-83304CM/04
参数 6; 寄存 器 编号
指定 用 来 输出 此 程序 的 状态 的 寄存 器 编号 。
号 的 寄存 器 中 , 根 据 发 生 的 错误 存储 如 下 任何 一 个 值 。
编号 中 尚未 设 定 结果 。
\ 错
的 形式 错误 。
902: 由 参数 7 指定 的 位 置 寄存 器
参数 7: 位 置 寄 存 器 编号
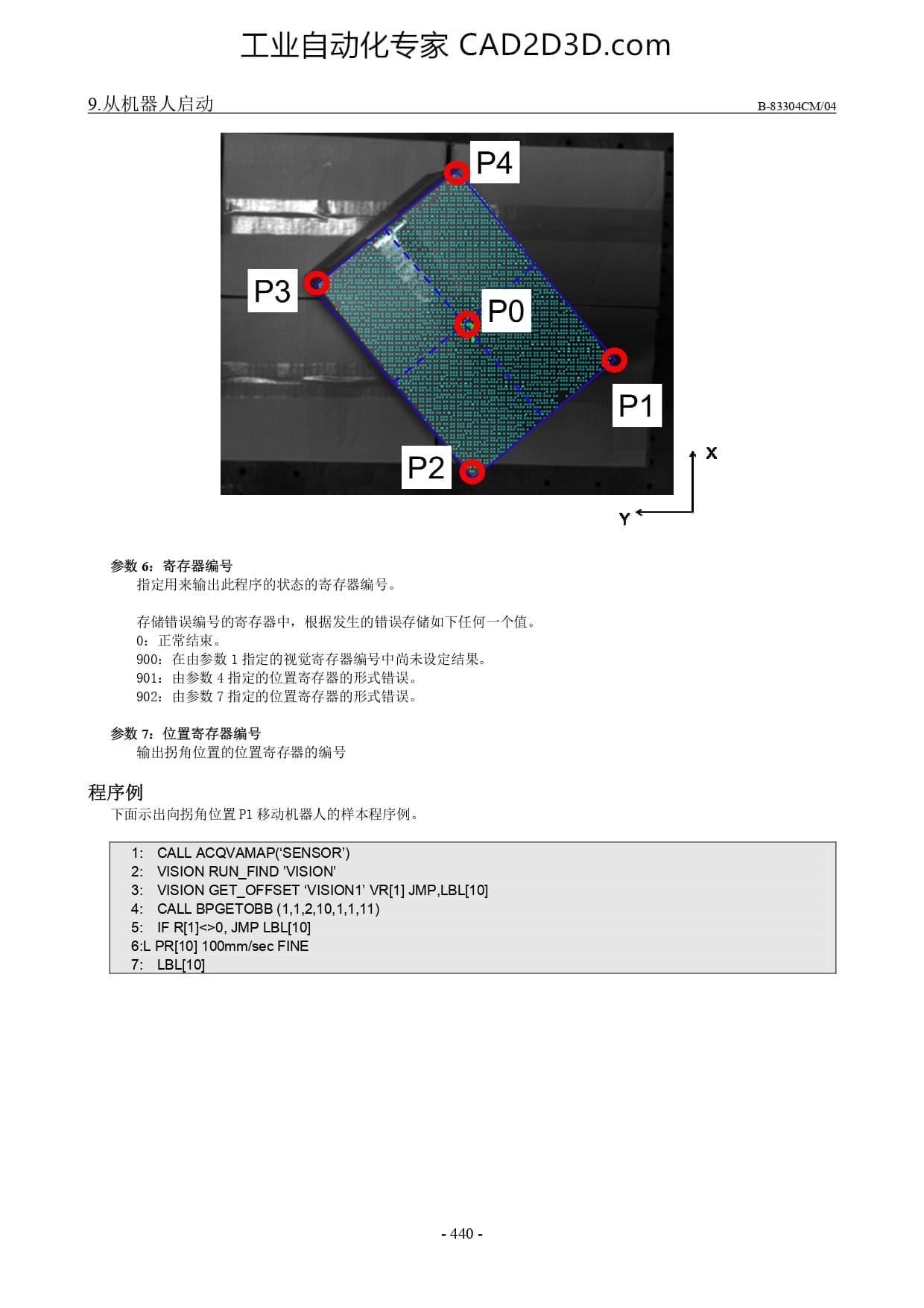
输出 拐角 位 置 的 位 置 寄 存 器 的 编号
程序 例
下 面 示 出 向 拐角 位 置 P1 移动 机 器 人 的 样本 程序 例 。
CALL ACQVAMAP(SENSOR )
VISION RUN_FIND VISION
VISION GET_OFFSET ‘VISION1' VR[1] JMP,LBL[10]
CALL BPGETOBB (1,1,2,10,1,1,11)
- IF R[1]<>0, JMP LBL[10]
6:L PR[10] 100mm/sec FINE
7. LBL[10]
PO
o
-440 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)