目标位置的设定
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 10. 视 觉 应 用 画面
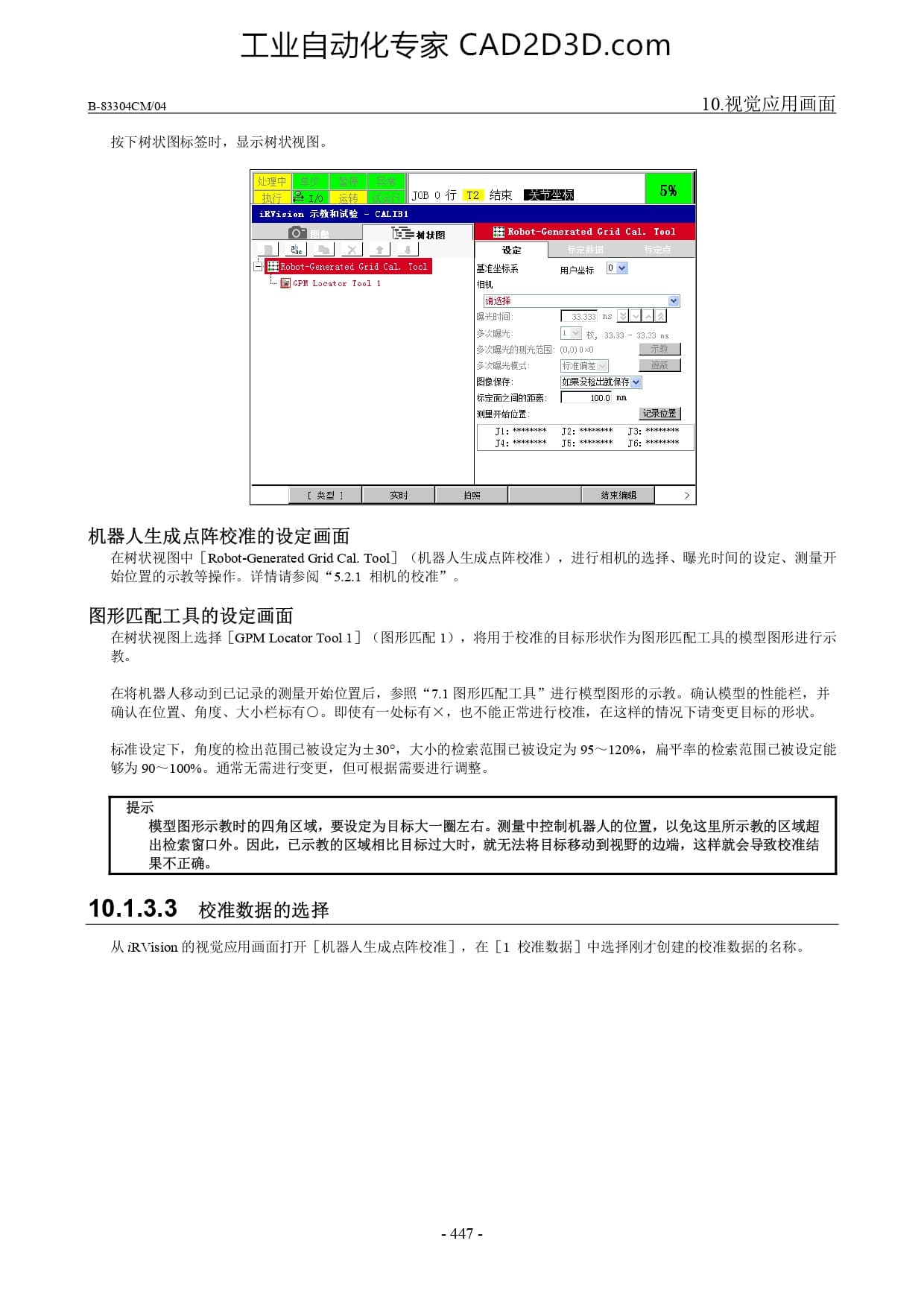
按 下 树 状 图 标签 时 , 显 示 树 状 视图 。
mosty [0V
.
于 _
el
2
2
e AT
测 旦 开放 位 置
了
了 Too
机 器 人 生成 点 阵 校准 的 设 定 画面
在 树 状 视图 中 [Robot-Generated Grid Cal Tool] 《机 器 人 生成 点 阵 校准 ) , 进 行 相机 的 选择 、 桌 光 时 间 的 设 定 、 测 量 开
始 位 置 的 示 教 等 操作 。 详 情 请 参阅 “5.2.1 相机 的 校准 ”。
图 形 匹 配 工具 的 设 定 画面
在 树 状 视图 上 选择 [GPM Locator Tool 1] 〈 图 形 匹 配 1)》, 将 用 于 校准 的 目标 形状 作为 图 形 匹 配 工具 的 模型 图 形 进行 示
教 。
在 将 机 器 人 移动 到 已 记录 的 测量 开始 位 置 后 , 参 照 “
确认 在 位 置 、 角 度 、 大 小 栏 标 有 〇 。 即 使 有 一 处 林
范围 已 被 设 定 为 士 30", 大 小 的 林
变更 , 但 可 根据 需要 进行 调
标 FF, 角度 的 检
59 90~100%. i
模型 图 形 示 教 时 的 四 角 区 域 , 要 设 定 为 目标 大 一 圈 左 右 。 测 量 中 控制 机 器 人 的 位 置 , 以 免 这 里 所 示 教 的 区 域 超
出 检索 窗口 外 。 因 此 , 已 示 教 的 区 域 相 比 目标 过 大 时 , 就 无 法 将 目标 移动 到 视野 的 边 端 , 这 样 就 会 导致 校准 结
果 不 正确 。
10.1.3.3 ”校准 数据 的 选择
M iR Vision 的 视觉 应 用 画面 打开 [机 器 人 生成 点 阵 校准 ] , 在 [1 校准 数据 ] 中 选择 刚才 创建 的 校准 数据 的 名 称 。
-447-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)