校准用程序的生成
工业 自动 化 专家 CAD2D3D.com
B-83304CM/04 10. 视 觉 应 用 画面
[二 fision 御
用
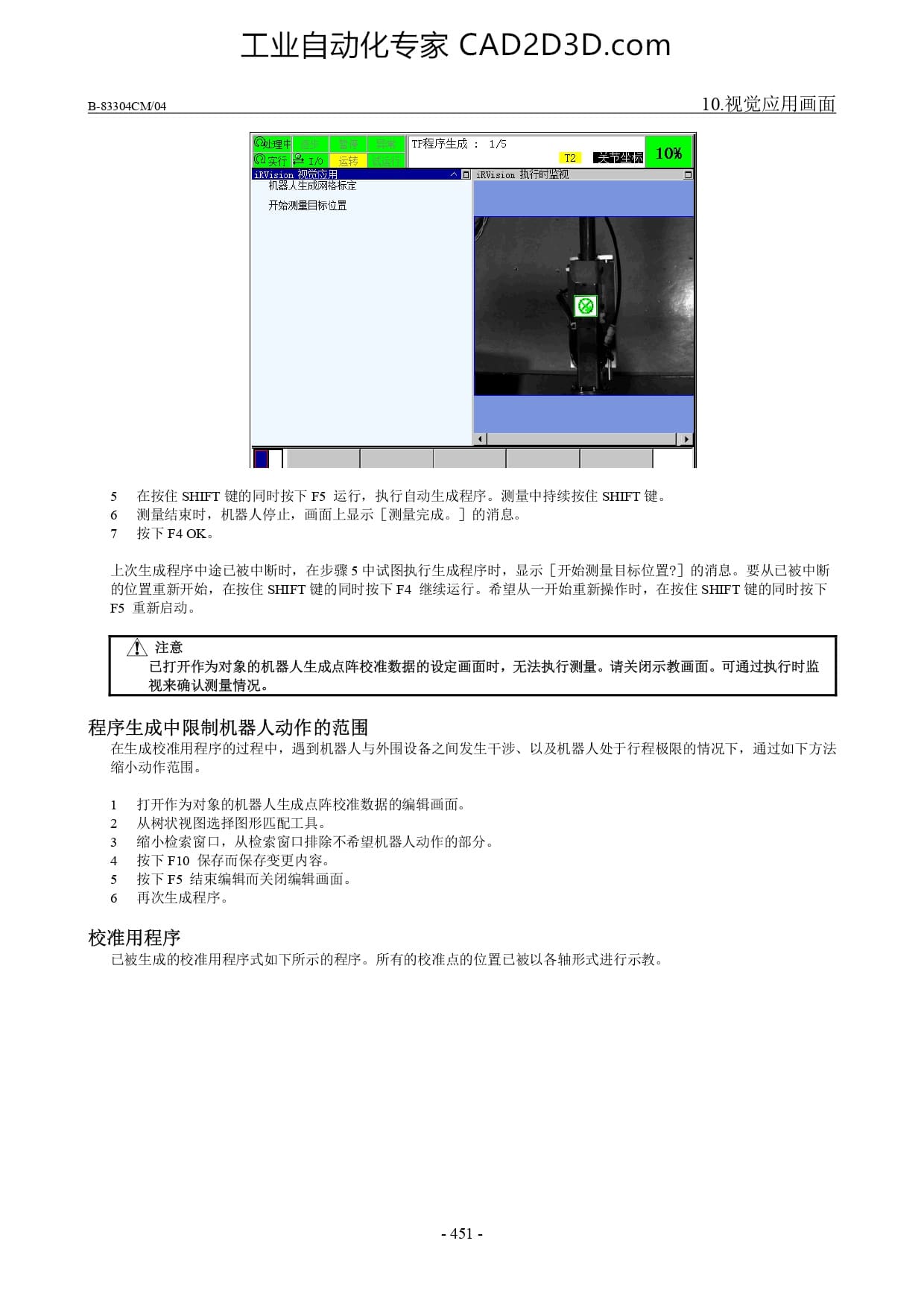
机 器 人 生成 网 带 标 定
开始 测量 目标 习 置
5 ”在 按 住 SHIFT 键 的 同时 按 下 FS 运 和
6 ”测量 结束 时 , 机 器 人 停止 ,
7 按 下 F4OK。
上 次 生成 程序 中 途 已 被 中 断 时 , 在 步骤 5 中 试图 执行 生成 程序 时 , 显 示 [开始 测量 目标 位 置 ?] 的 消息 。 要 从 已 被 中 断
的 位 置 重 新 开始 , 在 按 住 SHIFT 键 的 同时 按 下 F4 继续 运行 。 希 望 从 一 开始 重新 操作 时 , 在 按 住 SHIFT 键 的 同时 按 下
FS 重新 启动 。
企 注意
已 打开 作为 对 象 的 机 器 人 生成 点 阵 校准 数据 的 设 定 画面 时 , 无 法 执行 测量 。 请 关闭 示 教 画面 。 可 通过 执 :
视 来 确认 测量 情况 。
限制 机 器 人 动作 的 范围
准 用 程序 的 过 程 中 , 遇 到 机 器 人 与 外 围 设备 之 间 发 生 干 涉 、 以 及 机 器 人 处 于 行程 极限 的 情况 下 , 通 过 如 下 方法
缩小 动作 范围 。
1 打开 作为 对 象 的 机 器 人 生成 点 阵 校准 数据 的 编辑 画面
2 从 树 状 视图 选择 图 形 匹 配 工具 。
3 ”缩小 检索 窗口 , 从 排除 不 希望 机 器 人 动作 的 部 分 。
4 按 下 Fl0 保存 而 保存 变更 内 容 。
S 按 下 Fs 结束 编辑 而 关闭 编辑 画面 。
6 ”再 次 生成 程序 。
校准 用 程序
已 被 生成 的 校准 用 程序 式 如 下 所 示 的 程序 。 所 有 的 校 疹 位 置 已 被 以 各 轴 形 式 进行 示 教 。
-451-
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)