校准用程序的生成
工业 自动 化 专家 CAD2D3D.com
10. 视 觉 应 用 画面 B-83304CM/04
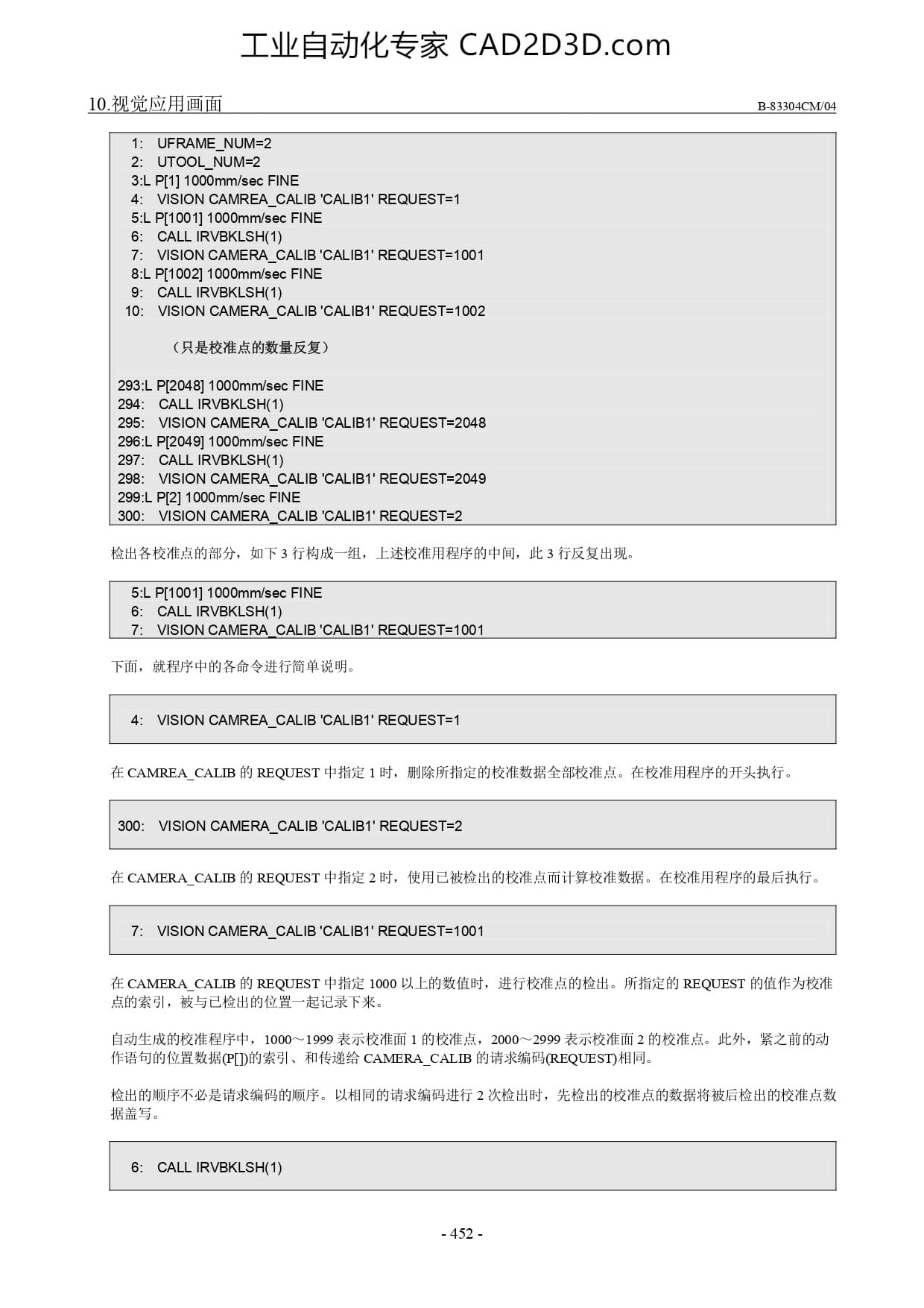
1: UFRAME_NUM=2
2: UTOOL_NUM=2
3:L P[1] 1000mm/sec FINE
: VISION CAMREA_CALIB 'CALIB1 REQUEST=1
5:L PI[1001] 1000mmy/sec FINE
6: CALL IRVBKLSH(1)
7: VISION CAMERA_CALIB'CALIB1' REQUEST=1001
8:L P[1002] 1000mm/sec FINE
9: CALL IRVBKLSH(1)
10: VISION CAMERA_CALIB 'CALIB1' REQUEST=1002
《只 是 校准 点 的 数量 反复 )
293:L P[2048] 1000mmy/sec FINE
294: CALL IRVBKLSH(1)
295: VISION CAMERA_CALIB 'CALIB1' REQUEST=2048
296:L P[2049] 1000mm/sec FINE
297: CALL IRVBKLSH(1)
298: VISION CAMERA_CALIB 'CALIB1' REQUEST=2049
299:L P[2] 1000mm/sec FINE
300: VISION CAMERA_CALIB 'CALIB1' REQUEST=2
检 出 各 校 ;
部 分 , 如 下 3 行 构成 一 组 , 上 述 校准 用 程序 的 中 间 , 此 3 行 反复 出 现 。
5:L PI[1001] 1000mmysec FINE
6: CALL IRVBKLSH(1)
7:_VISION CAMERA_CALIB'CALIB1 REQUEST=1001
下 面 , 就 程序 中 的 各 命令 进行 简单 说 明 。
4: VISION CAMREA_CALIB 'CALIB1 REQUEST=1
在 CAMREA_CALIB 的 REQUEST 中 指定 1 时, 删除 所 指定 的 校准 数据 全 部 校准
点 。 在 校准 用 程序 的 开头 执行 。
300: VISION CAMERA_CALIB 'CALIB1 REQUEST=2
在 CAMERA_CALIB 的 REQUEST 中 指定 2 时 , 使 用 已 被 检 出 的 校准 点 而 计算 校准 数据 。 在 校准 用 程序 的 最 后 执行 。
7: VISION CAMERA_CALIB 'CALIB1 REQUEST=1001
在 CAMERA_CALIB 的 REQUEST 中 指
索引 , 被 与 已 检 出 的 位 置 一 起 记录
£ 1000 以 上 的 数值 时 , 进 行 校
下 来 。
检 出 。 所 指定 的 REQUEST 的 值 作为 校准
,1000 一 1999 表示 校准 面 1 的 校准
索引 、 和 传递 给 CAMERA_CALIB 提
一 2999 表示 校准 面 2 的 校准 点 。 此 外 , 紧 之 前 的 动
求 编码 (REQUEST 相同 。
顺序 不 必 是 请 求 编码 的 顺序 。 以 相同 的 请 求 编 码 进行 2 次 检 出 时 , 先 检 出 的 校准 点 的 数据 将 被 后 检 出 的 校准 点 数
6: CALL IRVBKLSH(1)
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)