参数的设定
工业 自动 化 专家 CAD2D3D.com
10. 视 觉 应 用 画面 B-83304CM/04
用 户 坐 标 系 编号
指定 要 设 定 的 用 户 坐 标 系 编号 。 只 有 在 要 设 定 的 坐标 系 中 选择 了 【用户 坐标 ] 时 才 了 予以 指定 。 用 户 坐 标 系 编号 中 可 以 指
定 1 一 9 的 任意 的 编号 。
工具 坐标 系 编号
指定 要 设 定 的 工具 坐标 系 编号 。 只 有 在 要 设 定 的 坐标 系 中 选择 了 [工具 坐标 ] 时 才 了 予以 指定 。 工 具 坐标 系 编号 中 可 以 指
定 1 一 10 的 任意 的 编号 。
计算 时 使 用 的 工具 坐标 系 编号
指定 计算 中 用 于 作业 的 工具 坐标 系 的 编号 。 只 有 在 要 设 定 的 坐标 系 中 选择 了 [用 户 坐 标 ] 时 才 了 予以 指定 。 这 里 指定 的 工
有 具 坐标 系 , 在 点 阵 坐标 系 设置 测量 中 将 被 改写 。 工 具 坐 标 系 编号 中 可 以 指定 1 一 10 的 任意 的 编号 。
相机 名 称
指定 测量 中 使 用 的 相机 。 将 光标 指向 [相机 和 名称] 行 , 按 下 F4 选择 , 从 所 显示 的 弹出 式 菜单 中 予以 选择 。 尚 未 创建 相
机 数据 时 , 参 考 “4. 相机 ”创建 相机 数据 , 选 择 该 相机 数据 的 名 称 。
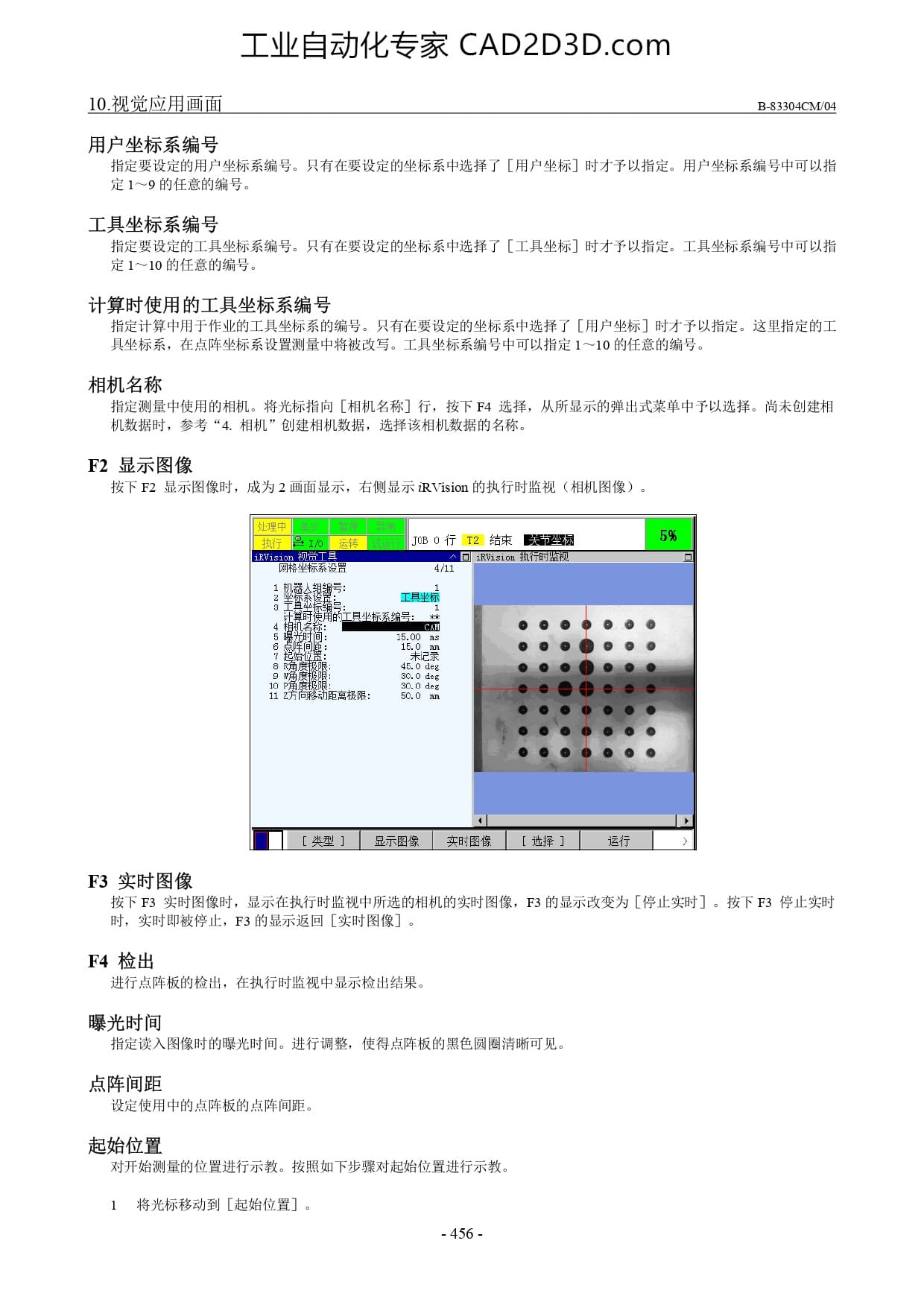
F2 显示 图 像
按 下 F2 显示 图 像 时 , 成 为 2 画面 显示 , 右 侧 显示 座 Vision 的 执行 时 监视 (相机 图 像 )。
F3 实时 图 像
按 下 F3 实时 图 像 时 , 显 示 在 执行 时 监视 中 所 选 的 相机 的 实时 图 像 ,F3 的 显示 改变 为 [停止 实时 ] 。 按 下 F3 停止 实时
时 , 实 时 即 被 停止 ,F3 的 显示 返回 【实时 图 像 ] 。
F4 检 出
进行 点 阵 板 的 检 出 , 在 执行 时 监视 中 显示 检 出 结果 。
曝光 时 间
指定 读 入 图 像 时 的 曝光 时 间 。 进 行 调整 , 使 得 点 阵 板 的 黑色 圆圈 清晰 可 见 。
点 阵 间距
设 定 使 用 中 的 点 阵 板 的 点 阵 间距 。
起 始 位 置
对 开始 测量 的 位 置 进行 示 教 。 按 照 如 下 步骤 对 起 始 位 置 进行 示 教 。
1 “将 光标 移动 到 [起 始 位 置 ] 。
-456 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)