目标位置的详细画面
工业 自动 化 专家 CAD2D3D.com
10. 视 觉 应 用 画面 B-83304CM/04
基准 坐标 系
显示 由 所 选 的 校准 数据 的 【基准 坐标 系 ] 指定 的 用 户 坐 标 系 号 码 。
面 间距
显示 校准 面 1 和 校准 面 2 的 距离 。
初始 位 置
显示 所 选 的 校准 数据 中 初始 位 置 是 否 已 被 示 教 。 已 被 示 教 时 显示 [已 记录 ] , 尚 未 被 示 教 时 显示 [未 记录 ] 。 将 光标 指
向 该 行 而 按 下 F3 位 置 时 , 移 动 到 初始 位 置 的 详细 画面 。
加 工 工具 坐标 系
机 器 人 生成 点 阵 校准 在 目标 位 置 的 测量 以 及 校准 用 程 月 成 中 , 将 工具 坐标 系 用 于 一 项 作业
标 系 的 号 码 。 在 改写 所 指定 的 工具 坐标 系 的 值 的 同时 进行 测量 , 因 而 即使 值 被 改写 , 也 要 指 和
号 码 。
指定 用 于 作业 的 工具 坐
没有 问题 的 工具 坐标 系 的
点 阵 数量 ( 横 )
指定 机 器 人 移动 目标 而 描绘 的 点 阵 图 形 的 点 阵 数量 。 请 指定 图 像 的 左右 方向 的 点 阵 数量 。
点 阵 数量 〈 竖 )
指定 机 器 人 移动 目标 而 描绘 的 点 阵 图 形 的 点 阵 数量 。 请 指定 图 像 的 上 下 方向 的 点 阵 数量 。
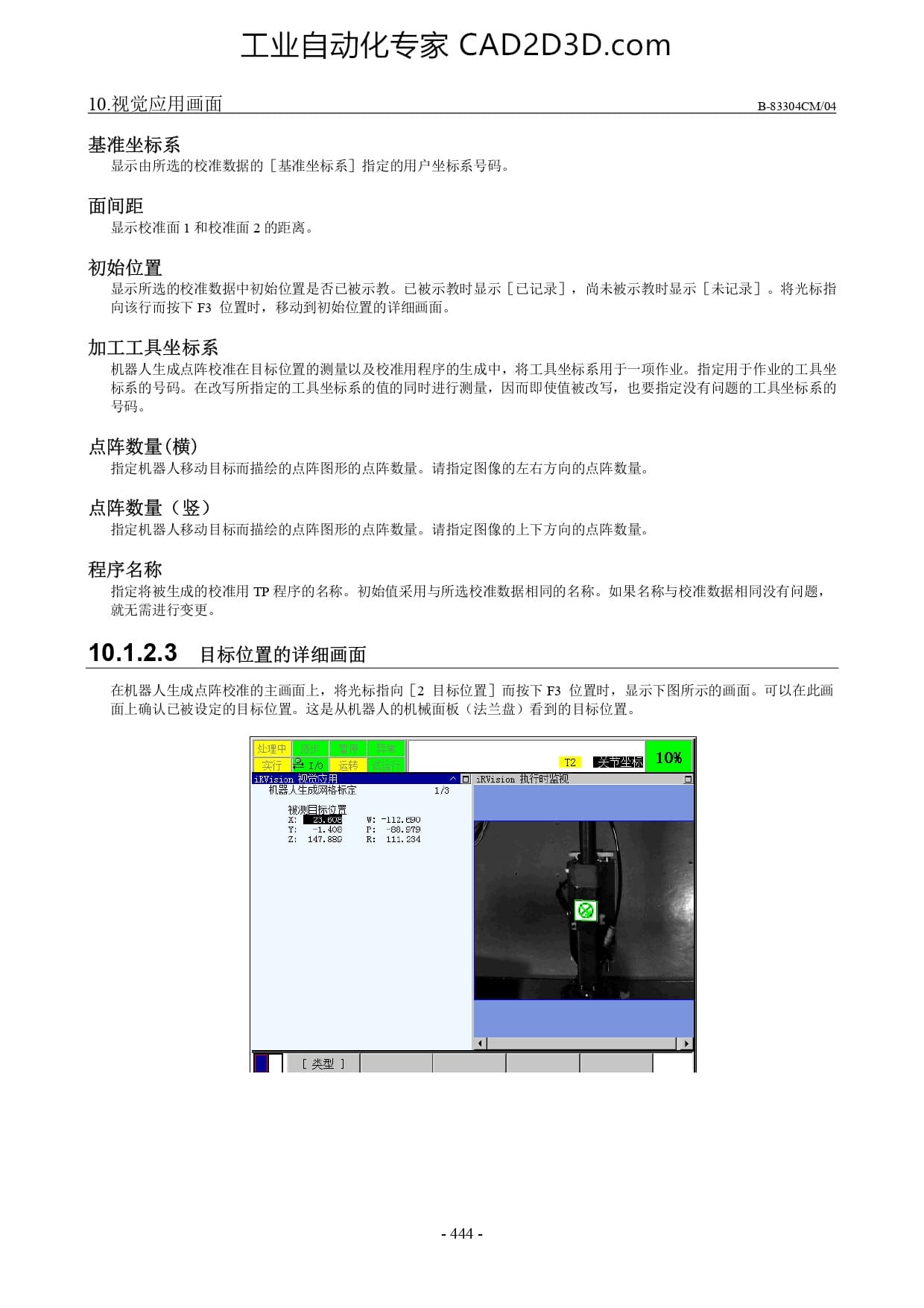
的 主 画 面 上 , 将 光标 指向 [2 目标 位 置 ] 而 按 下 F3 位 置 时 , 显 示 下 图 所 示 的 画面 。 可 以 在 此 画
目标 位 置 。 这 是 从 机 器 人 的 机 械 面板 〈 法 兰 盘 ) 看 到 的 目标 位 置 。
[0 Rvision 17
WRET
5 ¥ -112. 90
Y -Ldos P: -saorg
Zi 1d47:888 R: 115234
- 444 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)