目标位置的设定
工业 自动 化 专家 CAD2D3D.com
10. 视 觉 应 用 画面
B-83304CMI04
ER DA |
HLE MR R R AR 2
1 标定 数据
2 目标 位 置
3 生成 程序
[类 型 ]
10.1.3.4 目标 位 置 的 设 定
1/3
:
: 未 记录
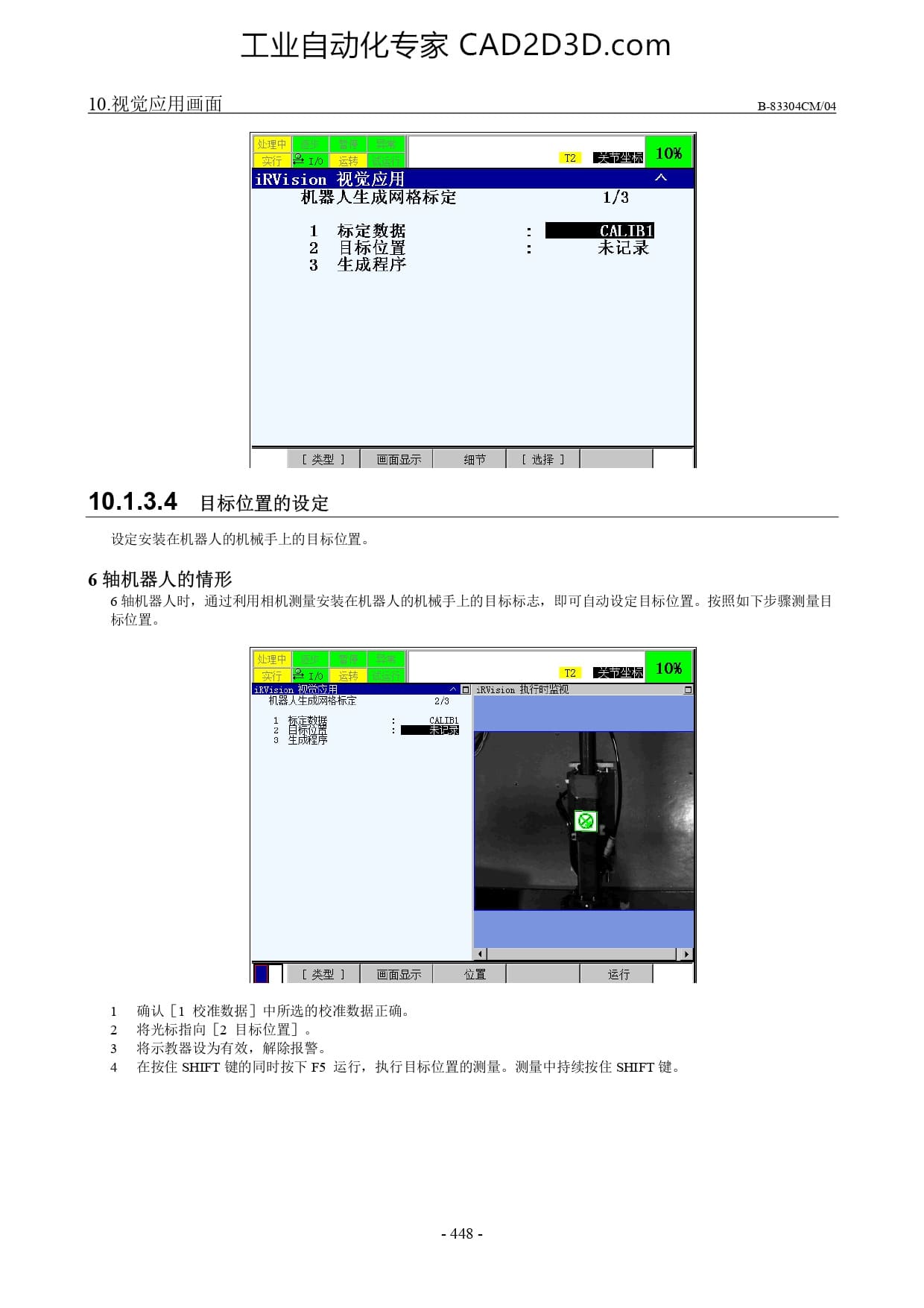
设 定安 装 在 机 器 人 的 机 械 手 上 的 目标 位 置 。
6 轴 机 器 人 的 情形
6 轴 机 器 人 时 , 通 过 利用 相机 测量 安装 在 机 器 人 的 机 械 手 上 的 目标 标志 , 即 可 自动 设 定 目标 位 置 。 按 照 如 下 步骤 测量 目
标 位 置 。
确认 [1 校准 数据 ] 中 所 选 的 校准 数据 正确 。
将 光标 指向 [2 目标 位 置 ] 。
时 设 为 有 效 , 解 除 报警 。
人 wb
-448 -
校 住 SHIFT 键 的 同时 按 下 Fs 运行 , 执 行 目标 位 置 的 测量 。
测量 中 持续 按 住 SHIFT 键 。
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)