IRVGETMSL
工业 自动 化 专家 CAD2D3D.com
B-§3304CM04 9. 从 机 器 人 局 动
指定 取出 几 个 判定 工具 的 测量 值 。
可 以 省 略 。 省 略 时 成 为 11- 参 数 3。
IRVGETMSL
取出 由 各 检 出 工具 下 的 判定 工具 的 值 1 一 值 10 指定 的 测量 值 。
此 ARETL 程序 取 如 下 参数 。
参数 1 视觉 程序 名
指定 1 台 相机 的 良和 否 检查 视觉 程序 的 名 称 。
参数 2; 检 出 结果 的 索引
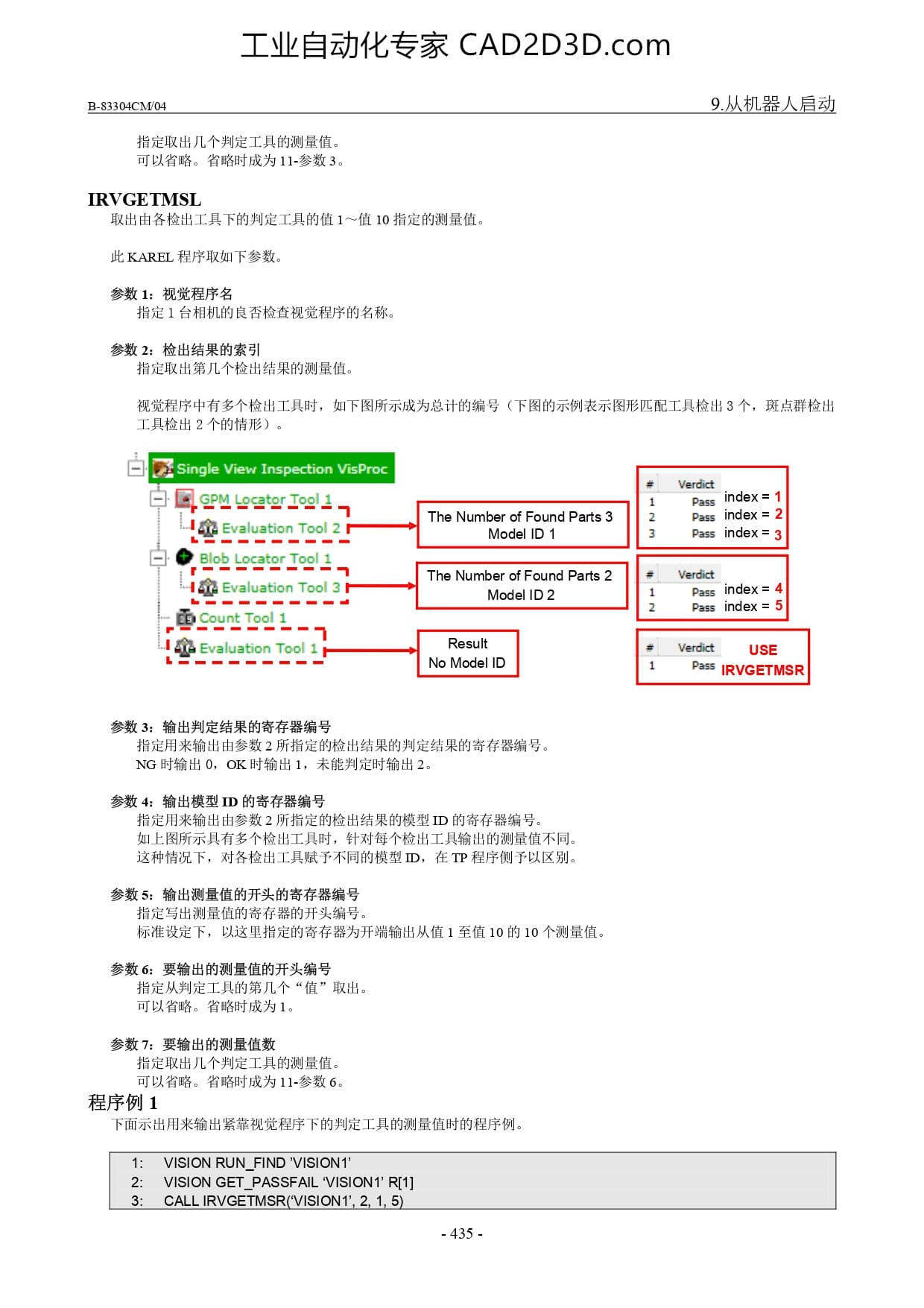
指定 取出 第 几 个 检 出 结果 的 测量 值 。
视觉 程序 中 有 多 个 检 出 工具 时 , 如 下 图 所 示 成 为 总 计 的 编号 〈 下 图 的 示例 表示 图 形 匹 配 工具 检 出 3 个 , 查 点 群 检 出
工具 检 出 2 个 的 情形 )
Verdict _
- aspu Locator Tool 1 pace index=1
i _‘1 The Number of Found Parts 3 pass index = 2
14 Evaluation Tool 2 Model ID 1 pass index= 3
1
. The Number of Found Parts 2
! 1} Model ID 2
! s 1
b m Evaluation Tool 1
=--------- No Model ID
参数 3 输出 判定 结果 的 寄存 器 编号
指定 用 来 输出 由 参数 2 所 指定 |
NG 时 输出 0,OK 时 输出 1, 未 |
结果 的 判定 结果 的 寄存 器 编号 。
叶 输 出 2。
参数 4, 输 出 模型 ID 的 寄存 器 编号
指定 用 来 输出 由 参数 2 所 指定 的 检 出 结果 的 模型 ID 的 寄存 器 编号 。
如 上 图 所 示 具 有 多 个 检 出 工具 时 , 针 对 每 个 检 出 工具 输出 的 测量 值 不 同 。
这 种 情况 下 , 对 各 检 出 工具 赋予 不 同 的 模型 ID, £ T 程序 侧 予 以 区 别 。
参数 5: 输出 测量 值 的 开头 的 寄存 器 编号
指定 写 出 测量 值 的 寄存 器 的 开头 编号 。
标准 设 定 下 , 以 这 里 指定 的 寄存 器 为 开端 输出 从 值 1 至 值 10 的 10 个 测量 值 。
参数 6: 要 输出 的 测量 值 的 开头 编号
指定 从 判定 工具 的 第 几 个 “ 值 ” 取 出 。
可 以 省 略 。 省 略 时 成 为 1。
参数 7: 要 输出 的 测量 值 数
指定 取出 几 个 判定 工具 的 测量 值 。
可 以 省 略 。 省 略 时 成 为 11- 参 数 6
程序 例 1
下 面 示 出 用 来 输出 紧 靠 视觉 程序 下 的 判定 工具 的 测量 值 时 的 程序 例 。
1: VISION RUN_FIND VISIONT
2: VISION GET_PASSFAIL VISIONT RI1]
3: CALLIRVGETMSR(VISIONT', 2, 1, 5)
-435 -
�

 本站所有资源一键获取,含3D模型、设计软件和案例视频等
本站所有资源一键获取,含3D模型、设计软件和案例视频等 支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)
支付宝现金红包,又疯狂“大面积”送钱了!人均 1-20 元 (无套路/每天能领)